














 7 / 13
7 / 13

О наведении камеры высокого разрешения, установленной на борту МКС…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 4
91
0
0 0
0 0
0
0
1
3
2
2
0
3
0
ˆ
ˆ
ˆ
ˆ
2
3
,
,
,
.
T
T
T
a
a
a
a
(13)
В любой момент времени
t
в промежутке от
Т
т
—
Т
до
Т
т
траектория перевода
ДПН из текущего положения на траекторию отслеживания цели может быть
получена следующим образом:
3
2
0
1
2
3
( )
.
t a t a t a t a
(14)
Для оси Бета получаются соотношения, аналогичные (13) и (14).
Для обеспечения непрерывности траектории по ускорению к формируемой
траектории дополнительно применяется фильтр высоких частот первого порядка с
частотой среза 2 Гц; задержка ~0,8 c, внесенная данным фильтром, учитывается при
прогнозировании положения МКС с помощью соотношений (1), (2) и (5).
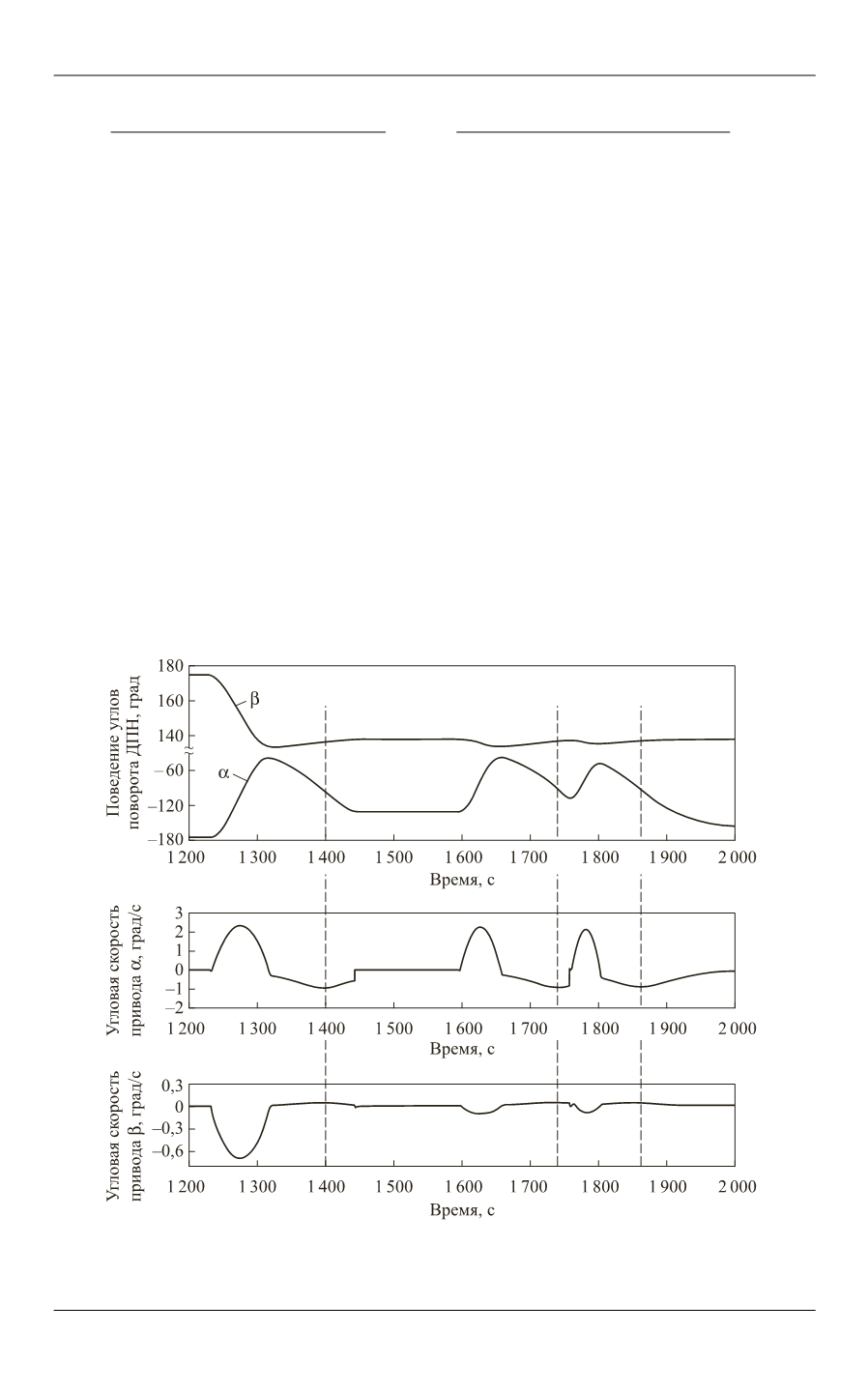
Результаты численного моделирования.
Для демонстрации работы алго-
ритма наведения на рис. 2 показано, как изменяются углы поворота ДПН и уг-
ловые скорости вращения приводов Альфа и Бета при моделировании трех по-
следовательных сеансов съемки с плавным переводом ДПН на траекторию от-
слеживания цели. В состав моделирующего стенда входят: наземная модель ди-
намики и бортовых систем управления движением МКС; модели аппаратуры
Рис. 2.
Изменение расчетных углов и угловых скоростей ДПН для отслеживания цели