














 11 / 14
11 / 14

ния задачи в режиме реального времени; схема, приведенная на pис. 5,
подтверждает, что данный маршрут позволяет успешно избежать все
препятствия на пути движения к целевой точке.
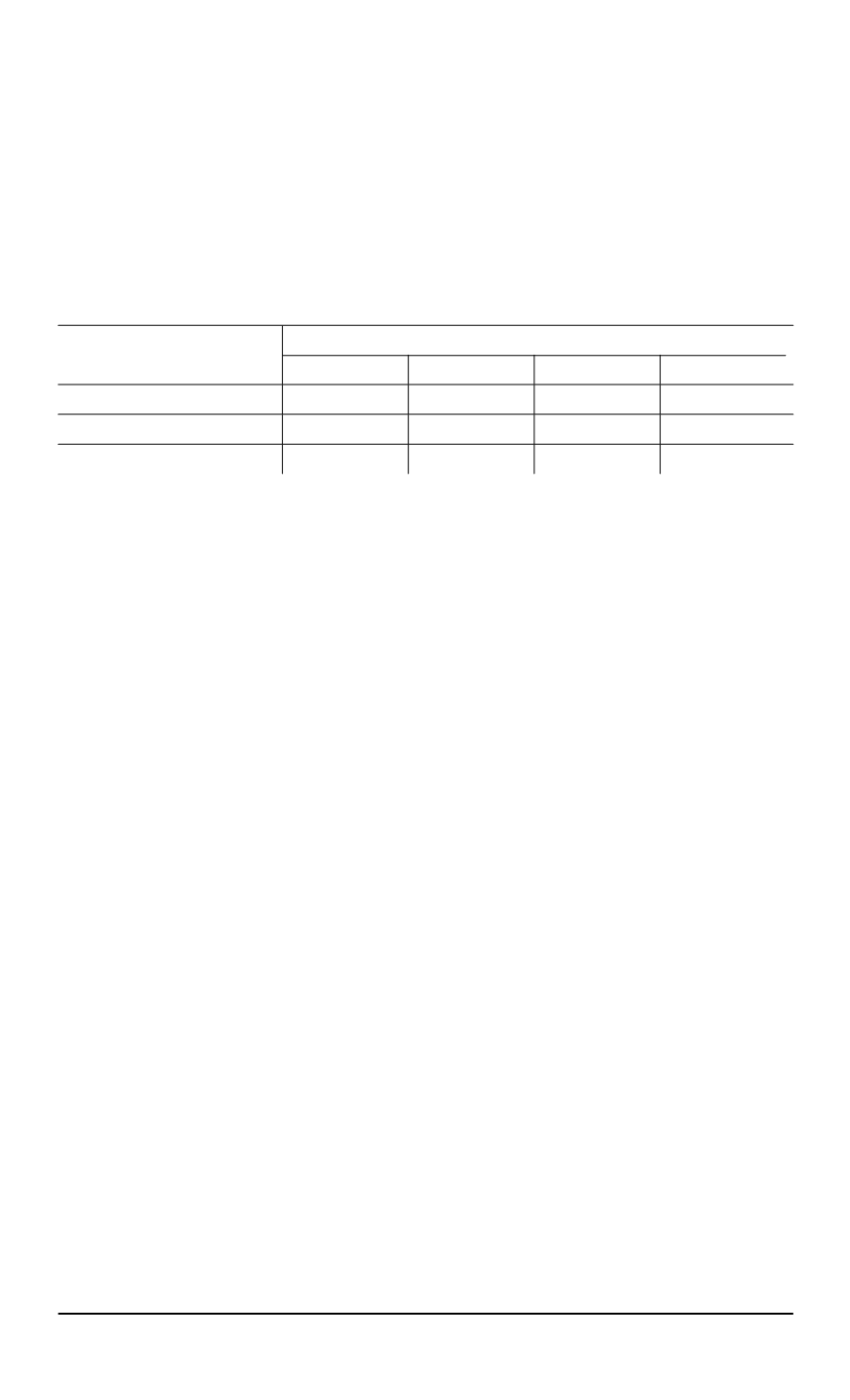
В табл. 2 приведены суммарное время полета, пройденная дистан-
ция и конечный промах в целевой точке, полученные при моделирова-
нии разработанного алгоритма планирования маршрута полета БПЛА
с использованиями заданных наборов весовых коэффициентов.
Таблица 2
Значения параметров полета
Параметр полета
Номер варианта
1
2
3
4
Время полета, с
8,2531
6,5344
7,4844
6,9531
Расстояние полета, м 1940,7142 2071,5317 2119,2769 2125,3314
Промах, м
46,2591
47,7834
44,4090
35,4288
Результаты моделирования, приведенные в табл. 2, показывают, что
характеристики полета непосредственно зависят от значения соответ-
ствующего весового коэффициента (
a
— учитывает влияние факта не-
прибытия в заданную точку;
b
— учитывает влияние затрат топлива;
d
— учитывает влияние конечного состояния). Чем больше значение
весового коэффициента, тем меньше значение характеристики поле-
та. Весовой коэффициент
c
учитывает влияние изменения ускорения,
обеспечивающего устойчивый полет БПЛА без радикального измене-
ния его динамических свойств, поэтому соответствующий маршрут
полета является наиболее стабильным по сравнению с другими вари-
антами.
Таким образом, из анализа результатов моделирования можно сде-
лать вывод о том, что с помощью предложенного алгоритма плани-
рования маршрута полета возможно в режиме реального времени вы-
сокоэффективно вычислять оптимальный маршрут полета с учетом
маневренных свойств БПЛА, а также проводить его обработку путем
сглаживания. При этом, регулируя значения соответствующих весовых
коэффициентов (
a
,
b
,
c
и
d
), можно удовлетворить разным требованиям
к характеристикам полета.
Заключение.
Изучены существующие методы планирования марш-
рута полета БПЛА по пространственной траектории в условиях го-
родской среды с использованием метода ЧЦЛП. Анализ результатов
моделирования показывает, что с помощью предложенного алгорит-
ма планирования маршрута полета возможно в режиме реального
времени и высокоэффективно вычислять оптимальный маршрут по-
лета с учетом маневренных свойств БПЛА, а также обрабатывать
его сглаживанием. В процессе полета из начальной точки в целевую
БПЛА успешно избежал все препятствия, поэтому данный алгоритм
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 2 63