














 3 / 12
3 / 12

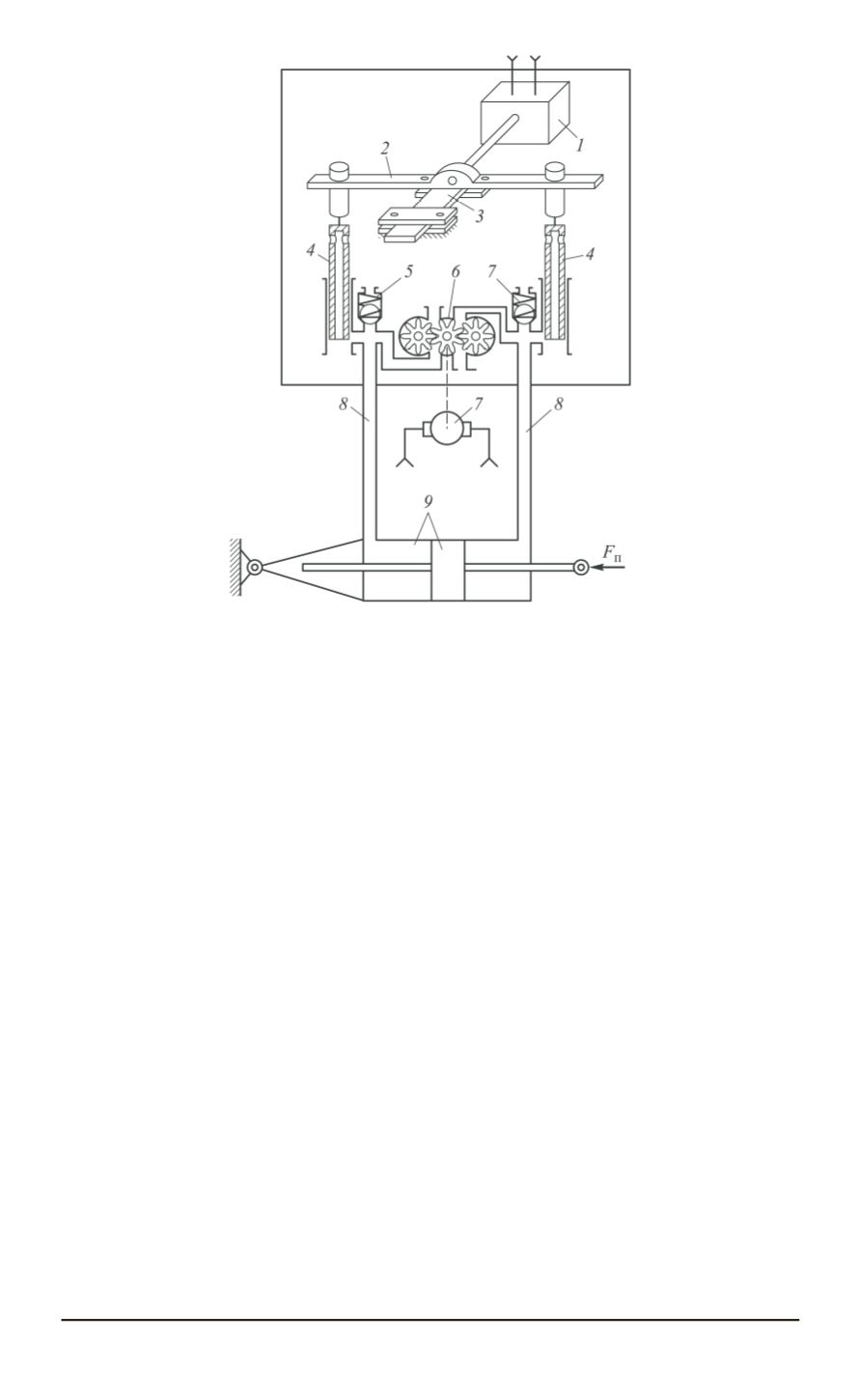
Рис. 1. Схема РМ с изменяемой в процессе работы структурой:
1
— поляризованное реле (электромеханический преобразователь);
2
— коромысло;
3
— плоская нагрузочная пружина;
4
— золотниковый плунжер;
5
— предохранитель-
ный клапан;
6
— трехшестеренный насос;
7
— приводной электродвигатель посто-
янного тока;
8
— трубопровод;
9
— силовой гидроцилиндр
мандного сигнала в установившемся режиме. При этом дополнительно
вычисляются характеристики тока, потребляемого электродвигателем
РМ. Поскольку длительности переходных процессов в РМ при каждом
командном сигнале различаются и наперед неизвестны, расчеты стати-
ческих характеристик этим методом могут сопровождаться ошибками
или непроизводительными затратами машинного времени.
В качестве иллюстрации (рис. 2) рассмотрим переходные процес-
сы скорости движения поршня РМ
V
п
=
dY
п
/dt
(
Y
п
— перемещение
поршня РМ;
t
— время) при различных значениях командного тока,
рассчитанные по приведенной ниже математической модели РМ для
постоянно действующей нагрузки на штоке силового гидроцилиндра
РМ 1000 Н.
Для обеспечения вычисления статических характеристик РМ с
заданной точностью и за минимальное время целесообразно исполь-
зовать методы, сходные с методами, применяемыми для расчетов
амплитудно-фазовых частотных характеристик динамических объек-
тов и систем управления [7–9].
До определенного времени создание и внедрение подобных мето-
дов и алгоритмов для расчета статических характеристик, основанных
20 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 5