Используя данный метод и варьируя число тонов
R
и их параметры
ν
r
,
С
r
,
T
r
, можно получить семейство псевдослучайных функций вида
(11), каждая из которых будет соответствовать спектру вида (13). При
этом сами параметры
R
,
ν
r
,
С
r
,
T
r
следует выбирать таким образом,
чтобы спектр модели был максимально приближен к спектру реальных
вибраций, а именно:
R
равно числу резонансных пиков реального
спектра,
ν
r
— резонансной круговой частоте
r
-го пика, параметр
T
r
должен задаваться как величина, обратная ширине
r
-го пика, а
С
r
—
подбираться так, чтобы мощность модели в окрестности
ν
r
была бы
близка к мощности реального спектра в той же окрестности.
Таким образом, получаем процедуру для синтеза класса псевдо-
случайных функций единой структуры с варьируемыми характеристи-
ками. Отличием данного метода от метода формирующих фильтров,
традиционно используемого для моделирования случайных сигналов
произвольного спектра, является отсутствие переходных процессов
при синтезе, что упрощает программную реализацию математической
модели.
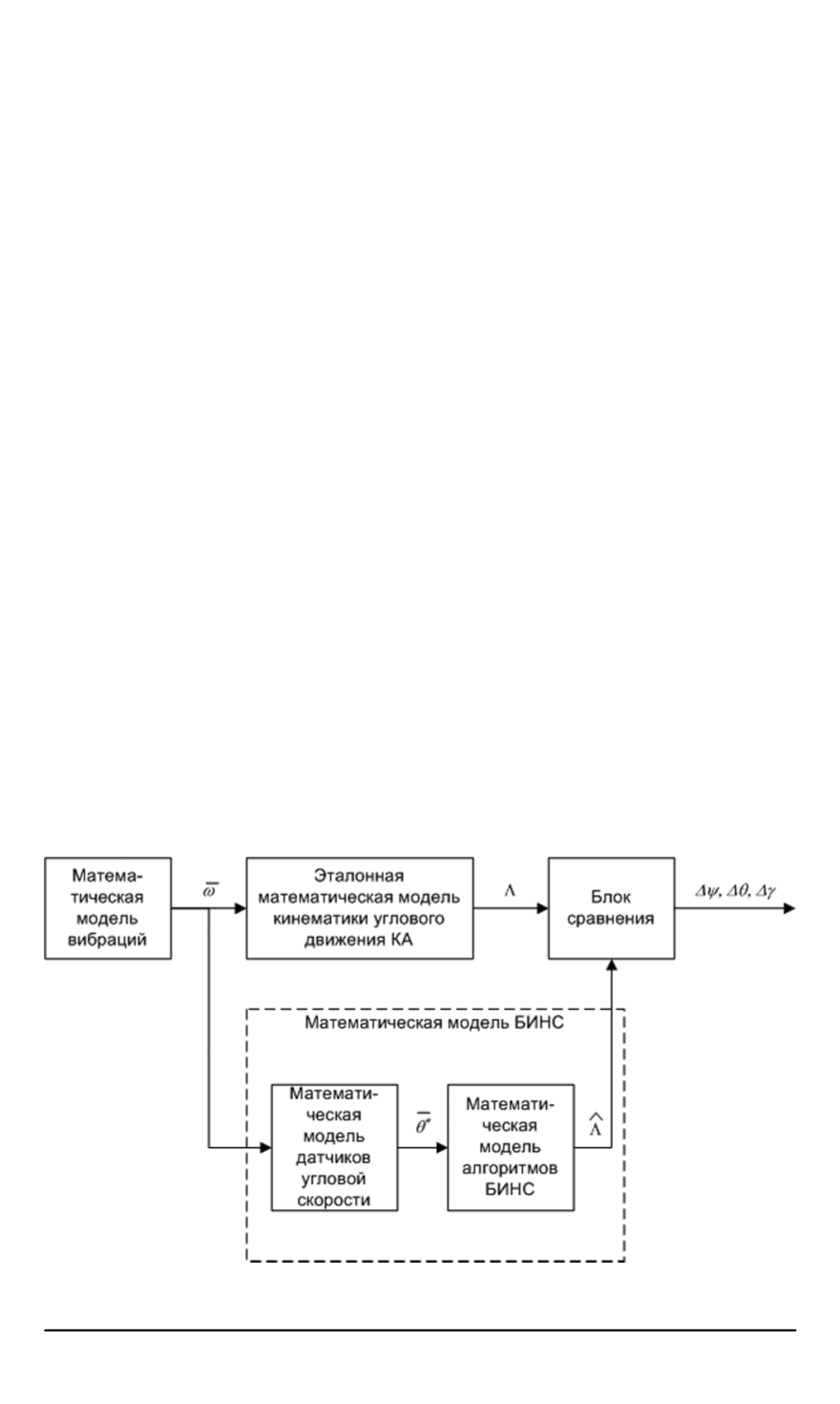
Моделирование.
Оценка кинематической погрешности БИНС вы-
полнена путем математического моделирования работы БИНС при
воздействии на объект угловых колебаний, соответствующих по сво-
им спектральным свойствам реальным вибрационным возмущениям,
действующим на КА в полете. Блок-схема моделирования показана
на рис. 2. В результате моделирования оценивается вычислительная
ошибка БИНС в виде углов малых поворотов
Δ
ψ
,
Δ
θ
,
Δ
γ
вокруг
осей
X, Y, Z
соответственно. Эти углы определяются по рассогласова-
нию между кватернионом ориентации КА
Λ
, вычисляемым эталонной
моделью кинематики углового движения КА, и оценкой кватерниона
Рис. 2. Блок-схема моделирования
72 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3


