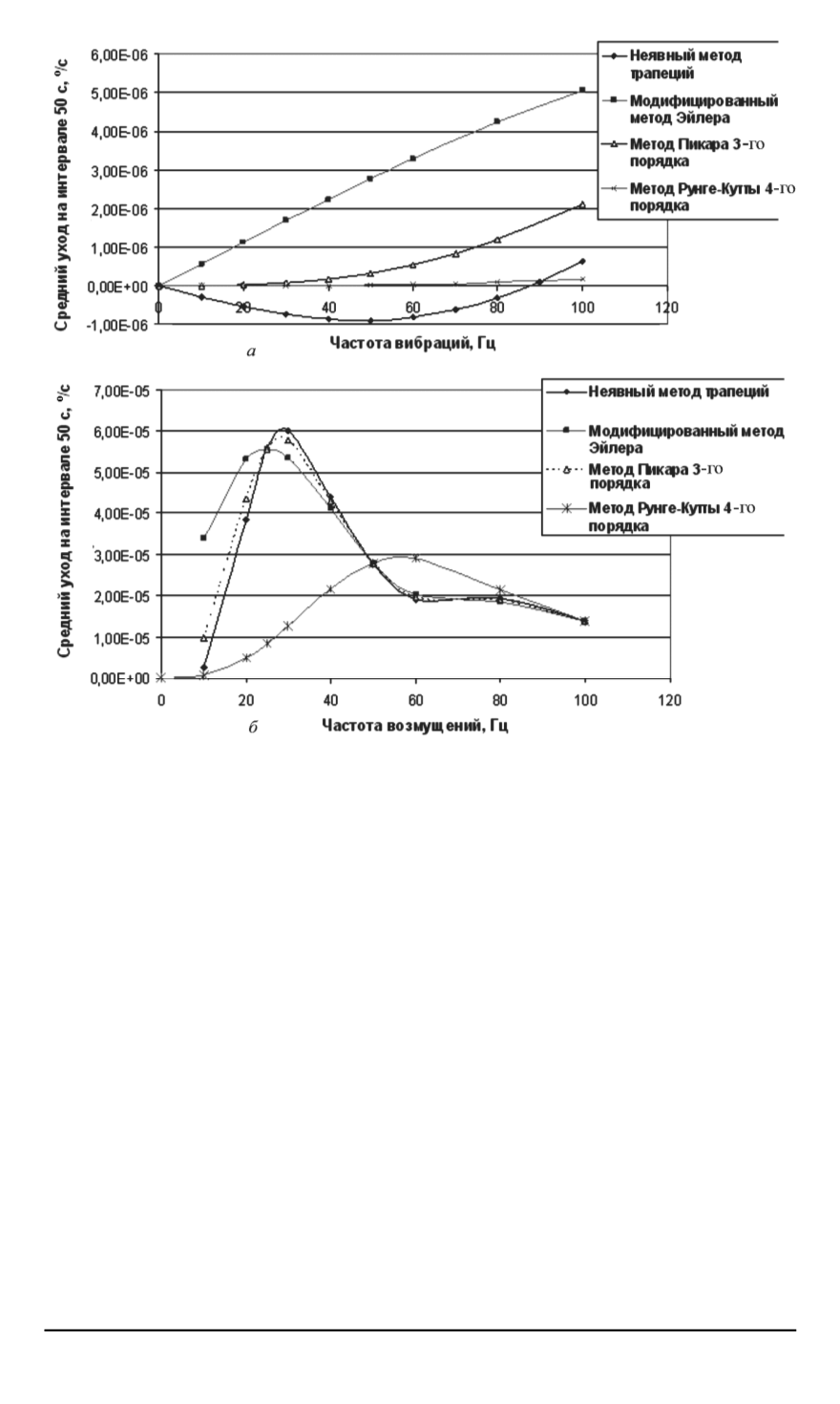
Рис. 3. Зависимость погрешности определения ориентации БИНС от частоты
гармонических вибраций при различных методах интегрирования и фиксиро-
ванной частоте квантования, а также при выполнении (
а
) и невыполнении (
б
)
условия теоремы Котельникова
выходная информация БИНС содержит низкочастотную ошибку по
третьей оси (т.е. по каналу
Х
).
Сравнение результатов, приведенных на рис. 3, показывает, что при
выполнении условия теоремы Котельникова погрешность существен-
но меньше, чем при его невыполнении; при этом в последнем случае
погрешность близка к аналитической оценке “сверху” по формуле (8).
Исходя из этого, делаем вывод, что выбирая частоту дискретности
таким образом, чтобы она более чем в 2 раза превышала частоту воз-
мущений, можно добиться снижения скорости дрейфа.
Как видно из рис. 3,
а
, при относительно низких частотах возмуще-
ния (значительно меньших, чем частота Котельникова
f
0
/
2
, где
f
0
—
частота дискретности БИНС) скорость дрейфа в целом снижается с
повышением порядка метода, это объясняется тем, что метод более
высокого порядка при прочих равных условиях дает лучшую аппрок-
симацию правой части дифференциальных уравнений кинематики.
74 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3


