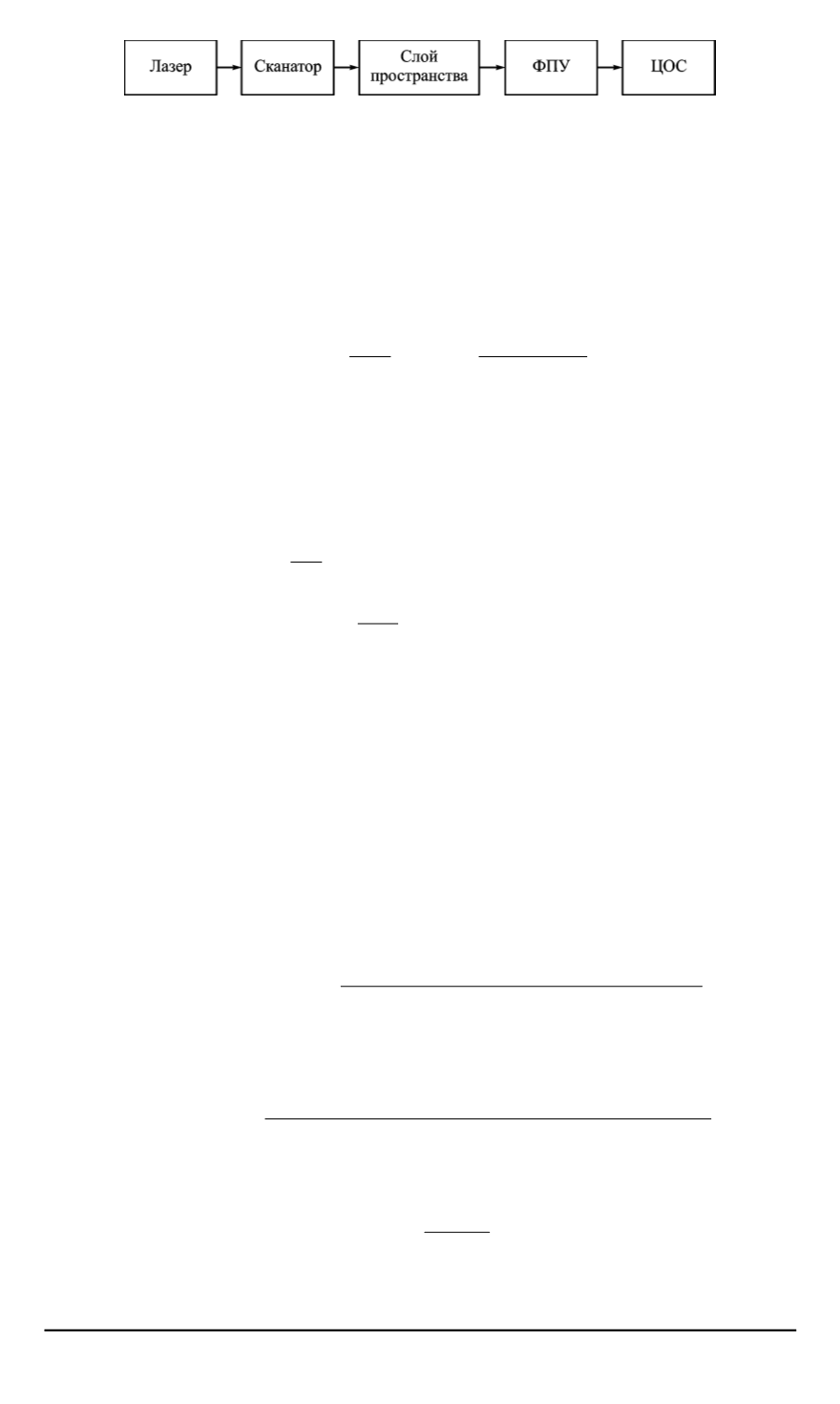
Рис. 1. Структурная схема лазерной сканирующей системы телеориентации
целесообразно перейти к ее модельному представлению. Рассмотрим
структуру сканирующей системы телеориентации (рис. 1).
Лазерный источник системы формирует гауссов пучок, в котором
распределение интенсивности в плоскости перетяжки определяется
известным выражением
I
(
x, y,
0) =
2
P
πω
2
0
exp
−
2(
x
2
+
y
2
)
ω
2
0
,
(1)
где
P
— мощность лазера,
ω
0
— радиус перетяжки пучка.
Пространственно-временное распределение интенсивности излу-
чения в плоскости управляемого объекта, образующее информацион-
ное поле ЛССТ, в приближении Фраунгофера представим в виде [6]
I
(
x, y, L, t
) = 8
πP
ω
0
λL
2
×
×
exp
−
8
πω
0
λL
2
(
x
−
x
(
t
))
2
+ (
y
−
y
(
t
))
2
,
(2)
где
λ
— длина волны излучения;
L
— расстояние от пункта управления
до объекта;
x
(
t
)
и
y
(
t
)
— уравнения, описывающие траекторию сме-
щения центра лазерного пучка во времени в плоскости управляемого
объекта, осуществляемого идеальным, не вносящим в пучок искаже-
ний, двухкоординатным сканатором.
При построчной развертке пучка в ИП законы сканирования в вер-
тикальной (
y
(
t
)
) и горизонтальной (
x
(
t
)
) плоскостях ИП при форми-
ровании вертикальных строк могут быть заданы в виде
y
(
t
) =
H
N
X
n
=1
J
X
j
=1
b
0
,
5
−
t
−
(
n
−
1)
T
y
−
X
j
T
j
−
(
j
−
1)
T
a
T
a
×
×
rect
t
−
(
n
−
1)
T
y
−
X
j
T
j
−
(
j
−
1)
T
a
−
0
,
5
T
a
T
a
,
(3)
x
(
t
) =
H
0
,
5
−
N
X
n
=1
1
N
−
1
1 (
t
−
nT
y
)
!
,
где
H
— полный линейный размер ИП в плоскости управляемого объ-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3 5


