для систем телеориентации всегда задается минимальная пропускная
способность
C
min
, можно выбрать такое значение
N
при формирова-
нии каждого полукадра ИП, которое обеспечивало бы одновременное
соблюдение как пространственных ограничений для ИП, так и огра-
ничений, связанных с быстродействием ЛССТ.
Можно отметить, что для нормального функционирования системы
при любом значении
W
должны выполняться два условия: во-первых,
необходимо потребовать, чтобы
C
o
>
C
min
, а, во-вторых, во избежание
пропусков сигнала, система должна обеспечивать
k
з
>
1
. Теперь мож-
но воспользоваться выражениями (29) и (30), составив на их основе с
учетом указанных условий двойное неравенство вида
log
2
−
kM SNR
2
min
6 (ln 0
,
5)
W
4
.
(
C
min
T
y
o
)
> N
>
>
"
2
W
r
−
1
,
25 ln
h
0
W
SNR
min
#
−
1
+ 1
.
(31)
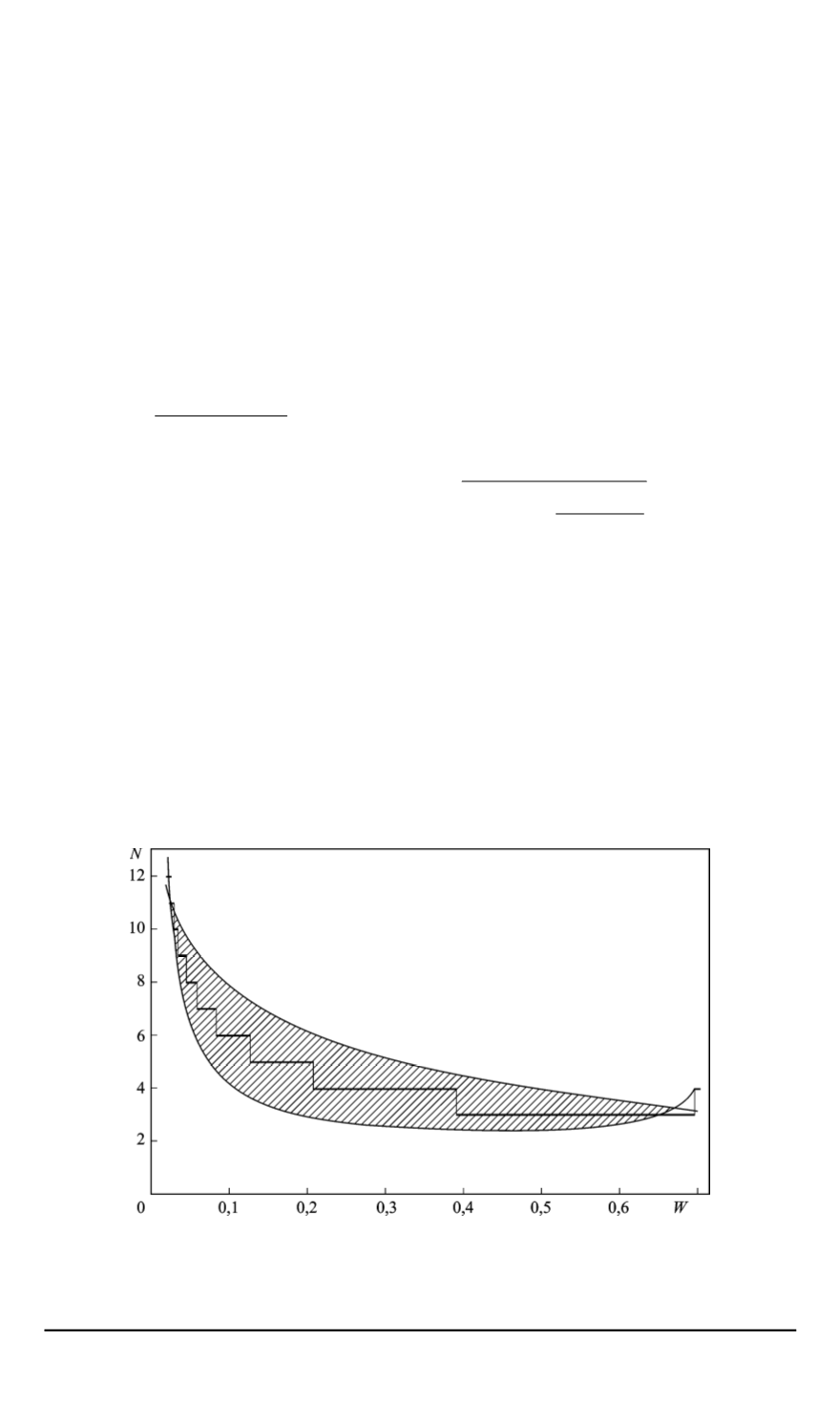
Решение неравенства (31) при
C
min
= 0
,
6
;
SNR
min
= 2
приведе-
но на рис. 6. Ступенчатой функцией показано среднее значение числа
строк
N
при изменении параметра
W
, а границы существования ре-
шения неравенства (31) соответствуют заштрихованной области.
Из рис. 6 следует, что неравенство (31) может выполняться только в
определенном интервале
W
, зависящем от соотношения величин, вхо-
дящих в (31). Так, с ростом пропускной способности
C
min
интервал
W
резко сокращается, что можно компенсировать ростом энергетическо-
го параметра
SNR
min
при выбранном алгоритме формирования ИП.
Рис. 6. Зависимость числа строк информационного поля
N
от обобщенной ко-
ординаты
W
при
C
min
= 0,6,
SNR
min
= 2
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3 13


