Рис
. 1.
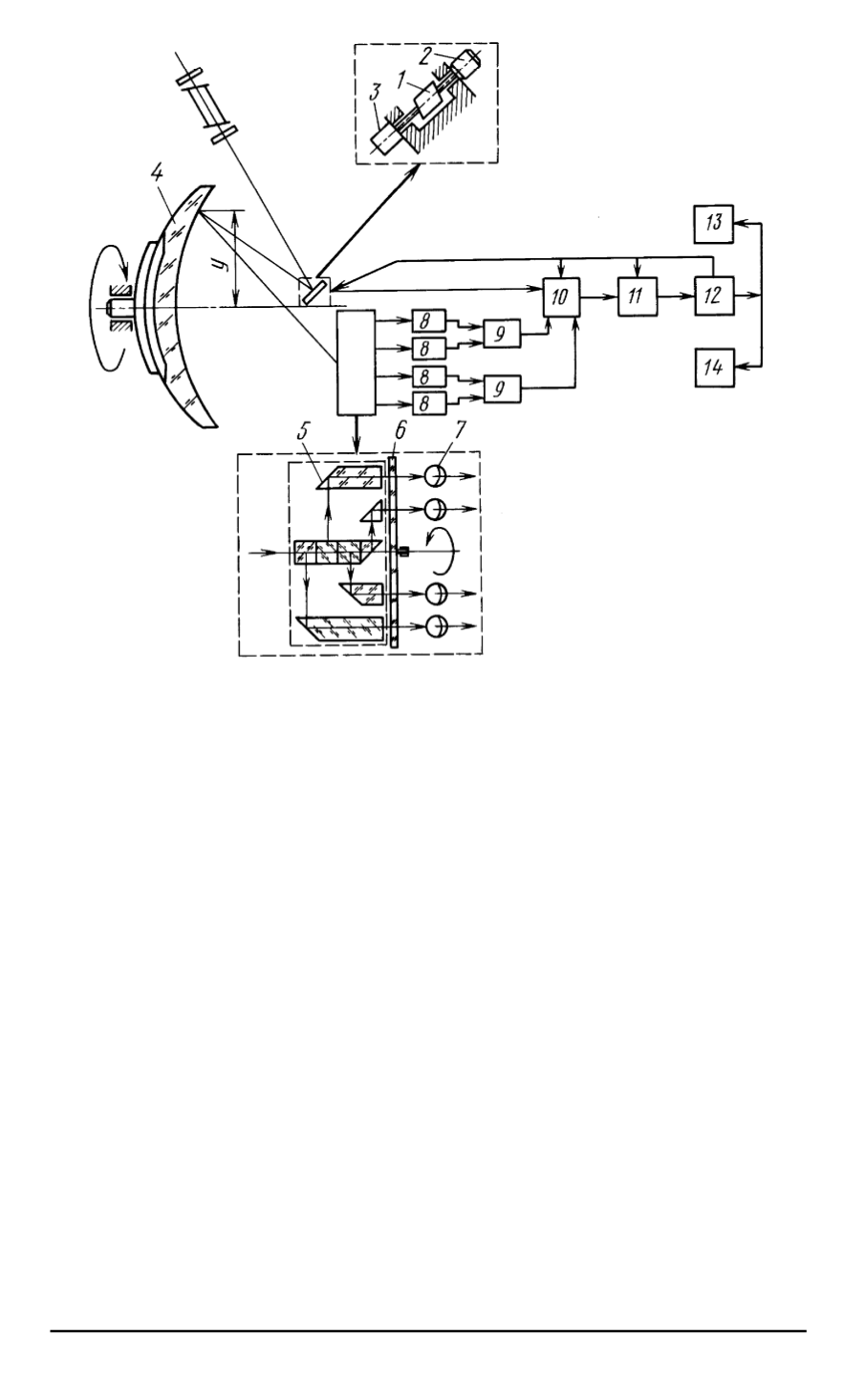
Функциональная схема устройства
,
осуществляющего контроль с помо
-
щью метода лазерного зондирования
:
1
—
поворотное зеркало
,
2
—
шаговый двигатель
,
3
—
растровый роторный датчик
угла поворота
,
4
—
контролируемая деталь
,
5
—
координатор
,
6
—
модулирующий
растр
,
7
—
фотодиоды
,
8
—
усилители
,
9
—
фазовый детектор
,
10
—
коммутирующий
анализатор
,
11
—
аналогово
-
цифровой преобразователь
,
12
—
ЭВМ
,
13
—
принтер
,
14
—
программно
-
командный блок станка
излучения усиливаются усилителями
8
и определяются в виде разно
-
сти фаз по взаимно перпендикулярным координатам фазометрами
9
.
Такая схема измерения
,
изложенная в работах
[2, 3],
обладает по
-
вышенной чувствительностью и исключает частотную составляющую
погрешности измерений
.
Сигналы с фазометров
9
поступают на коммутирующий анализа
-
тор
10
,
где находится информация о координате контролируемой зоны
y
,
поступившая с датчиков углов поворота
3
.
Сигналы преобразуют
-
ся в цифровой код цифровым преобразователем
11
и обрабатываются
ЭВМ
12
.
В памяти ЭВМ
12
находится информация о расчетных значениях
положения луча
.
ЭВМ сопоставляет полученную информацию с ин
-
формацией о расчетных значениях
,
преобразует разность значений к
38 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
2


