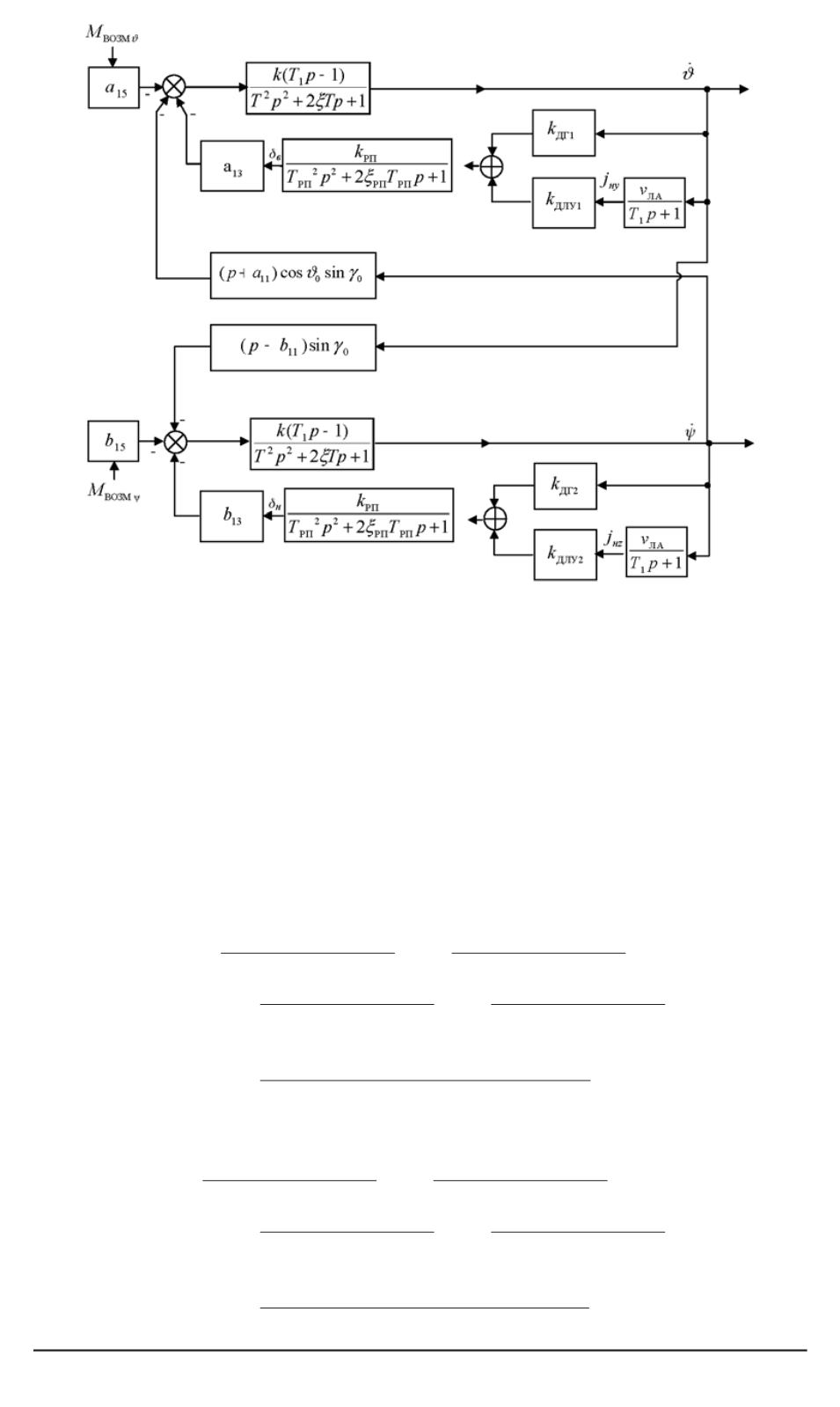
Рис. 1. Структурная схема двухканальной ССт
относительно осей
Z, Y
связанной системы координат соответственно [3];
v
ЛА
— скорость ЛА;
k
ДГ1,2
,
k
ДЛУ1,2
— коэффициенты усиления дифференци-
рующего гироскопа и датчика линейных ускорений соответственно.
Измерители и рулевой привод приняты безынерционными звеньями, так
как значения их собственных частот гораздо больше значений собственных
частот объекта — ЛА.
Описание модели системы в пространстве состояний.
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
˙
x
1
=
x
2
,
˙
x
2
=
−
А
13
А
21
+
В
23
В
11
А
11
А
21
+
В
21
В
11
x
1
−
А
12
А
21
+
В
22
В
11
А
11
А
21
+
В
21
В
11
x
2
+
+
В
13
А
21
−
А
23
В
11
А
11
А
21
+
В
21
В
11
x
3
+
В
12
А
21
−
А
22
В
11
А
11
А
21
+
В
21
В
11
x
4
+
+
k
а
15
А
21
M
Z
возм
+
kb
15
B
11
M
Y
возм
А
11
А
21
+
В
21
В
11
,
˙
x
3
=
x
4
,
˙
x
4
=
А
13
В
21
−
В
23
А
11
В
11
В
21
+
А
11
А
21
x
1
+
А
12
В
21
−
В
22
А
11
В
11
В
21
+
А
11
А
21
x
2
−
−
В
13
В
21
+
А
23
А
11
В
11
В
21
+
А
11
А
21
x
3
−
В
12
В
21
+
А
22
А
11
В
11
В
21
+
А
11
А
21
x
4
−
−
k
а
15
В
21
M
Z
возм
+
kb
15
А
11
M
Y
возм
В
11
В
21
+
А
11
А
21
,
(1)
100 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 4


