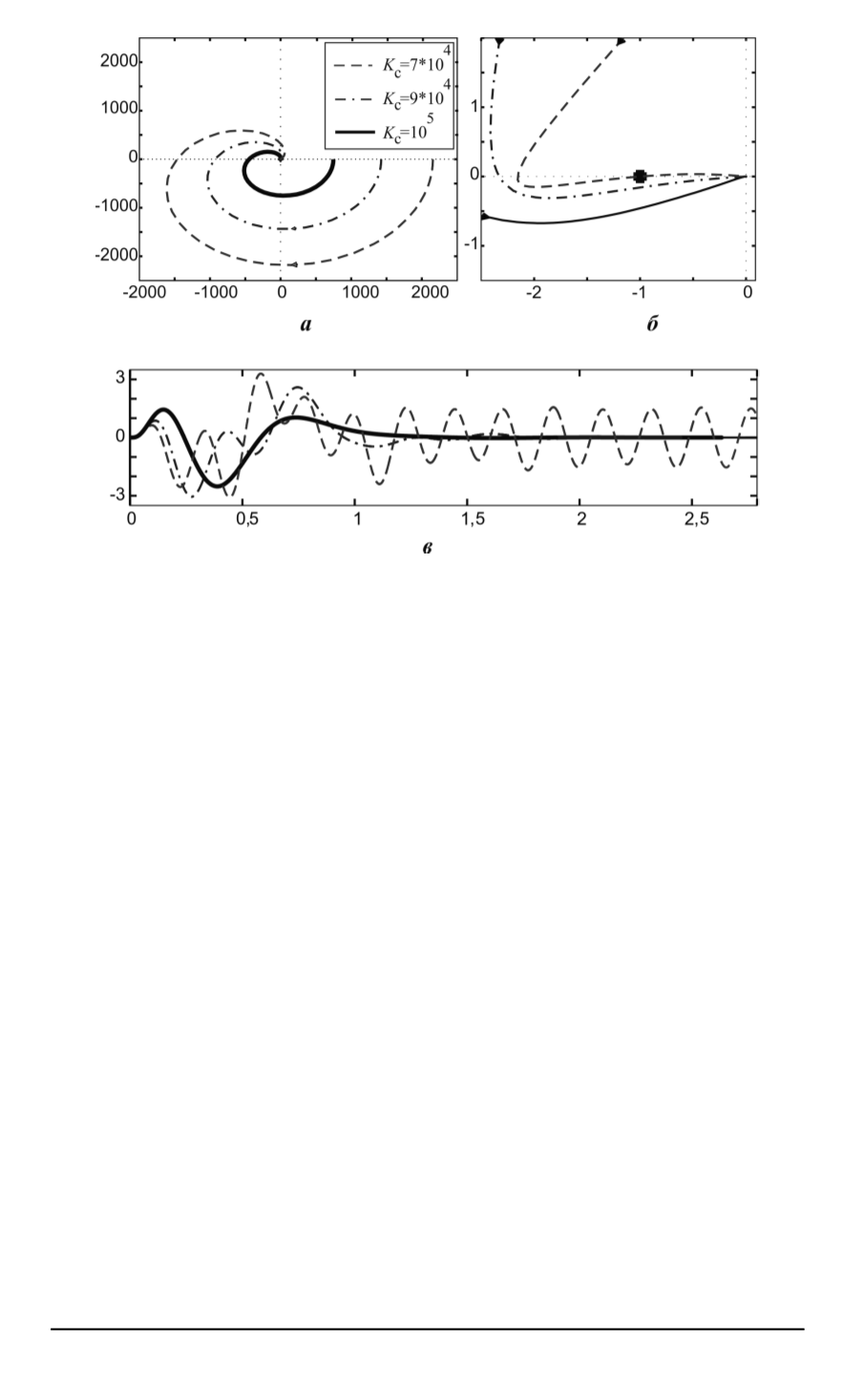
Рис. 4. Годографы функции Найквиста ИСУ двурукого МР и соответствующие
им переходные процессы
Δ
x
в системе по одной из координат при варьировании
жесткости захваченного объекта
На графике (
а
) представлены годографы функции Найквиста системы
в виде (7), на графике (
б
) — увеличенное изображение окрестности
точки
(
−
1
, j
0)
, на графике (
в
) — переходные процессы разности поло-
жений рук по одной из декартовых координат. Исследование полно-
стью подтвердило правильность полученных выше результатов.
Устойчивость ИСУ двурукого МР при связанном движении
с коррекцией сил и моментов реакции.
На практике очень редко
встречаются случаи, когда при операциях, выполняемых двумя руками
МР, не нужно контролировать возникающие силы и моменты реакции
связи. Погрешности, возникающие при движении каждой руки, могут
привести к падению удерживаемого объекта (если он зажат между ру-
ками) или к значительным нагрузкам на руки и переносимый объект.
Как правило, для коррекции сил и моментов реакции связи использу-
ют либо схемы пассивной податливости, когда на запястье МР крепит-
ся специальное компенсирующее устройство, например устройство с
вынесенным центром податливости, либо схемы активной податливо-
сти, когда силы и моменты, действующие на запястье МР, измеряются
силомоментным датчиком (СМД) для организации обратной силовой
связи.
Рассмотрим устойчивость ИСУ двурукого МР в случае, когда его
руки связаны и применяются методы для коррекции сил и моментов
реакции. Для примера применим активный метод коррекции меха-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1 91


