Q
2к
(
p
) = det
(
E
+
G
c
(
p
)
2
X
i
=1
J
i
W
в
i
(
p
)
J
т
i
+
J
i
W
i
(
p
)
J
−
1
i
G
п
(
p
)
)
−
1
.
(10)
Из выражения (10) следует, что применение механизма коррекции
сил и моментов реакции связи может привести к неустойчивости ИСУ
двурукого МР. Причем запасы устойчивости снижаются при повыше-
нии жесткости удерживаемого объекта. Это полностью соответствует
экспериментальным результатам, представленным в предыдущей ра-
боте авторов [9].
Исследование годографа функции Найквиста (10) в частотной
области позволяет обоснованно выбрать коэффициенты корректирую-
щего устройства (8), обеспечивающие заданные запасы устойчивости
системы.
Выражение (10) также можно расширить и на случай нескольких
взаимодействующих МР
(
N
≥
1)
:
Q
N
к
(
p
) = det
(
E
+
G
c
(
p
)
N
X
i
=1
J
i
W
в
i
(
p
)
J
т
i
+
J
i
W
i
(
p
)
J
−
1
i
G
п
(
p
)
)
−
1
.
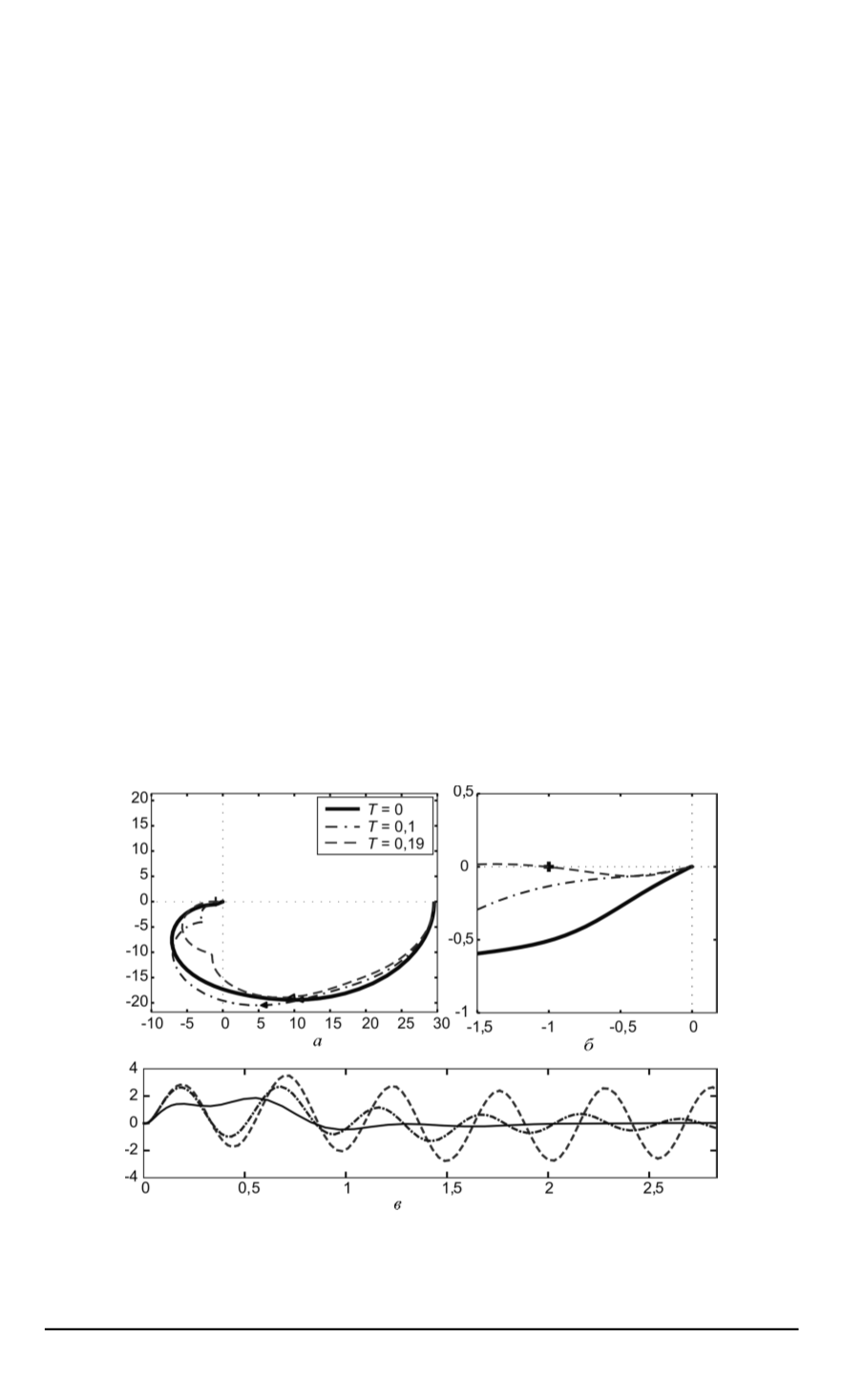
На рис. 6 приведены результаты исследования многомерной ИСУ
двурукого МР при податливом связанном движении в частотной и
временной областях при трех различных значениях постоянной вре-
мени запаздывания
T
корректирующего устройства (9). На графике (
а
)
Рис. 6. Годографы функции Найквиста ИСУ двурукого МР и соответствующие
им переходные процессы
Δ
x
в системе по одной из координат при варьировании
постоянной времени запаздывания корректирующего устройства
94 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1


