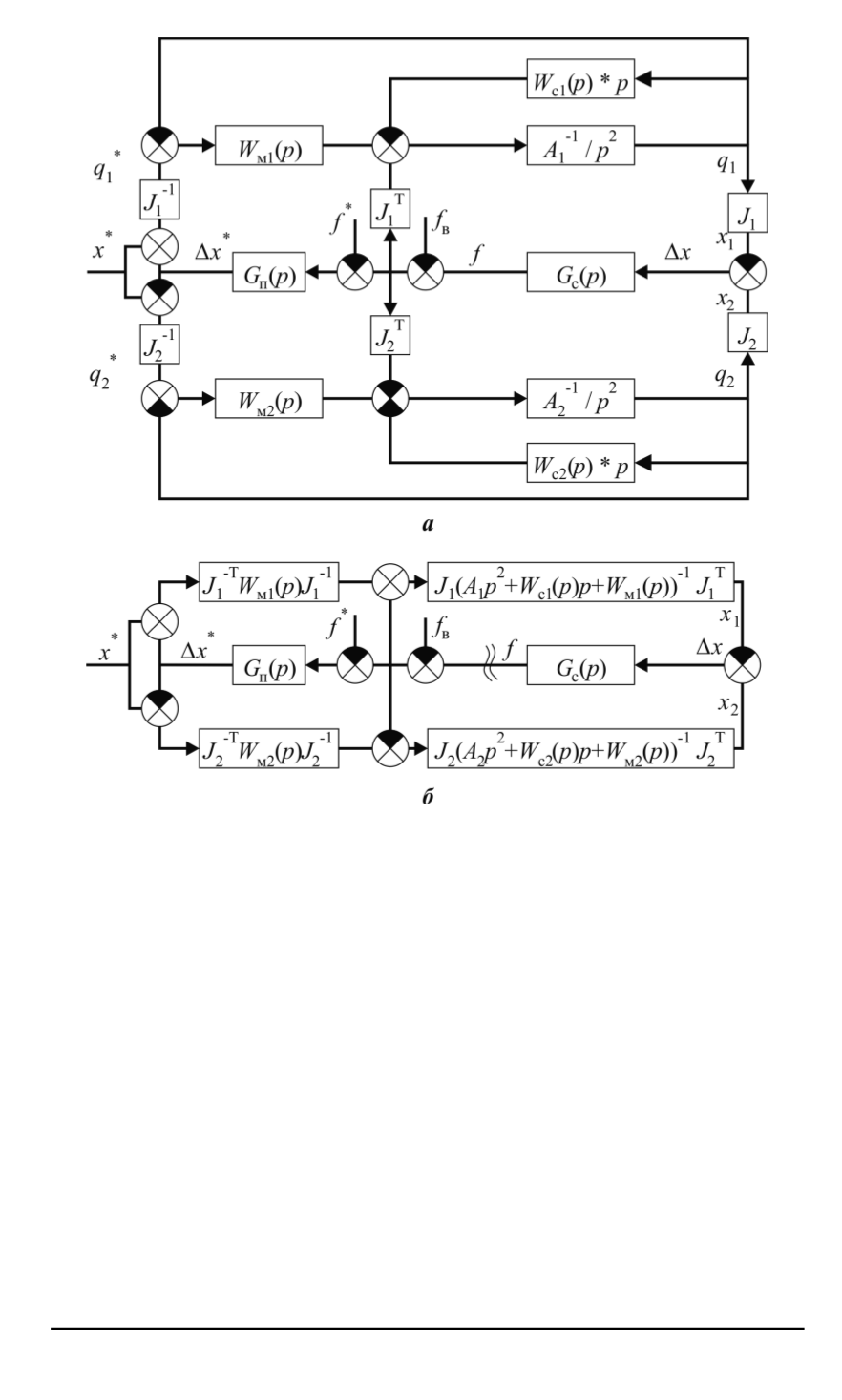
Рис. 5. Структура ИСУ двурукого МР при связанном движении с коррекцией
сил и моментов реакции
W
p
(
p
) =
f
(
t
)
/f
в
(
t
) =
=
G
c
(
p
)
2
X
i
=1
J
i
A
i
p
2
+
W
c
i
(
p
)
p
+
W
м
i
(
p
)
−
1
J
т
i
E
+
J
-т
i
W
мi
(
p
)
J
−
1
i
,
или с учетом обозначений (2) и (3)
W
p
(
p
) =
G
c
(
p
)
2
X
i
=1
J
i
W
в
i
(
p
)
J
т
i
+
J
i
W
i
(
p
)
J
−
1
i
G
п
(
p
)
.
Тогда выражение для функции Найквиста, позволяющей судить об
устойчивости ИСУ двурукого МР при податливом связанном движе-
нии (с блоком коррекции сил и моментов реакции связи) в зависимости
от устойчивости ИСУ рук МР в свободном пространстве, примет вид
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1 93


