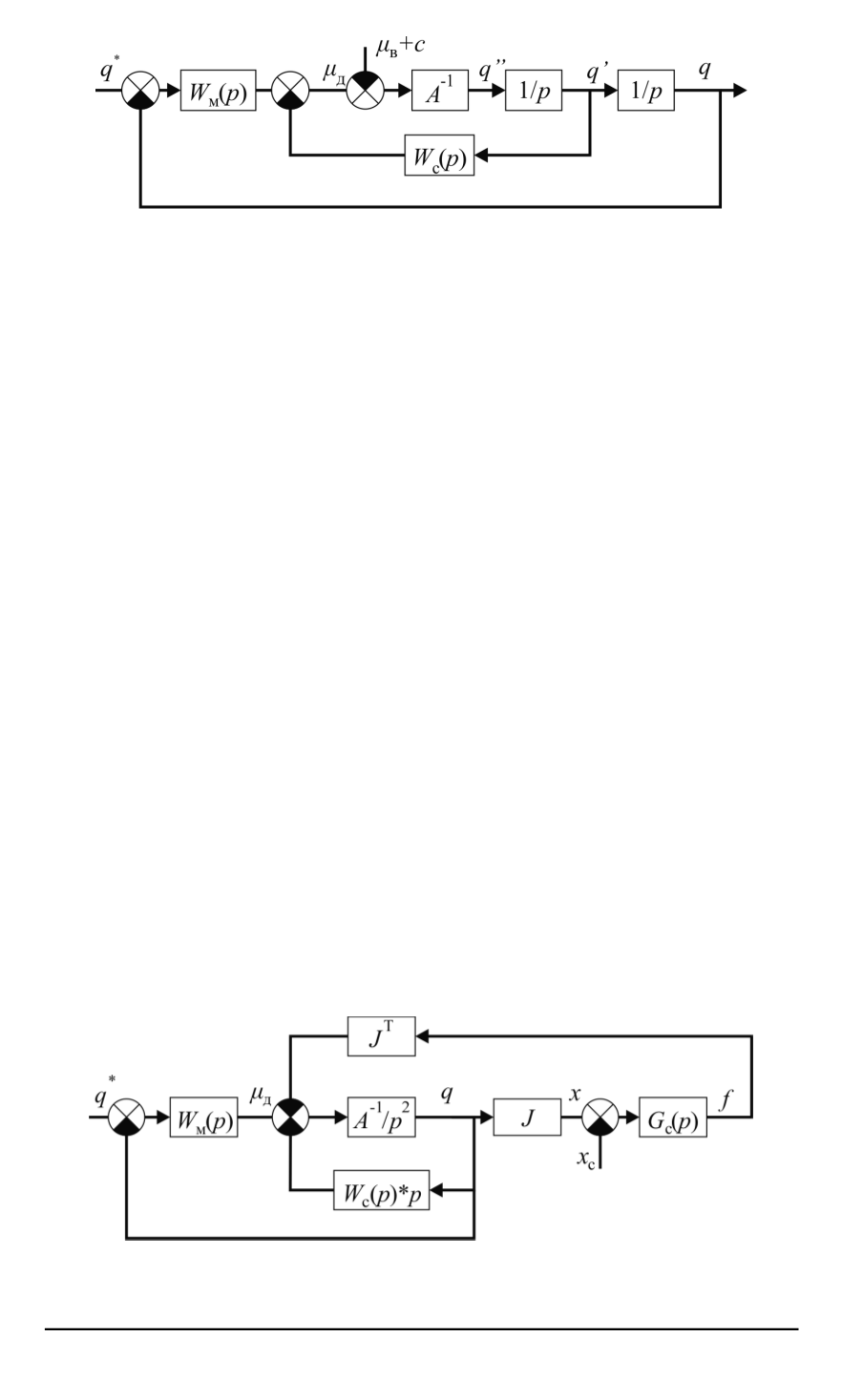
Рис. 1. Структурная схема исполнительной системы МР
Уравнения (1) можно представить в форме “вход-выход”:
q
(
t
) =
W
(
p
)
q
(
t
)
−
W
в
(
p
)
μ
в
,
где
W
(
p
) =
Ap
2
+
W
c
(
p
)
p
+
W
м
(
p
)
−
1
W
м
(
p
)
(2)
— матричная ПФ исполнительной системы управления (ИСУ) МР по
отношению к вектору входных управляющих воздействий;
W
в
(
p
) =
Ap
2
+
W
c
(
p
)
p
+
W
м
(
p
)
−
1
(3)
— матричная ПФ ИСУ МР по отношению к вектору возмущающих
воздействий.
Устойчивость ИСУ МР при взаимодействии с неподвижным
объектом.
Исследуем устойчивость многомерной ИСУ однорукого МР
при его взаимодействии с неподвижным объектом. Этот случай соот-
ветствует операциям, при выполнении которых один из манипуляторов
двурукого МР неподвижен. Мы будем исследовать устойчивость при
условии, что контакт уже установлен, не рассматривая процессы на
границе свободной зоны. Структурная схема, соответствующая этому
случаю, в линейном приближении представлена на рис. 2.
На схеме обозначено:
x
,
x
c
— декартовы координаты рабочего ор-
гана МР и неподвижного объекта соответственно;
f
— вектор сил и
моментов реакции в точке контакта;
J
— матрица Якоби для соот-
ношения
x
=
F
(
q
)
;
G
c
(
p
)
– матричная ПФ, определяющая свойства
контакта между МР и объектом (модель среды).
Рис. 2. Структурная схема многомерной ИСУ МР при взаимодействии с непо-
движным объектом
86 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1


