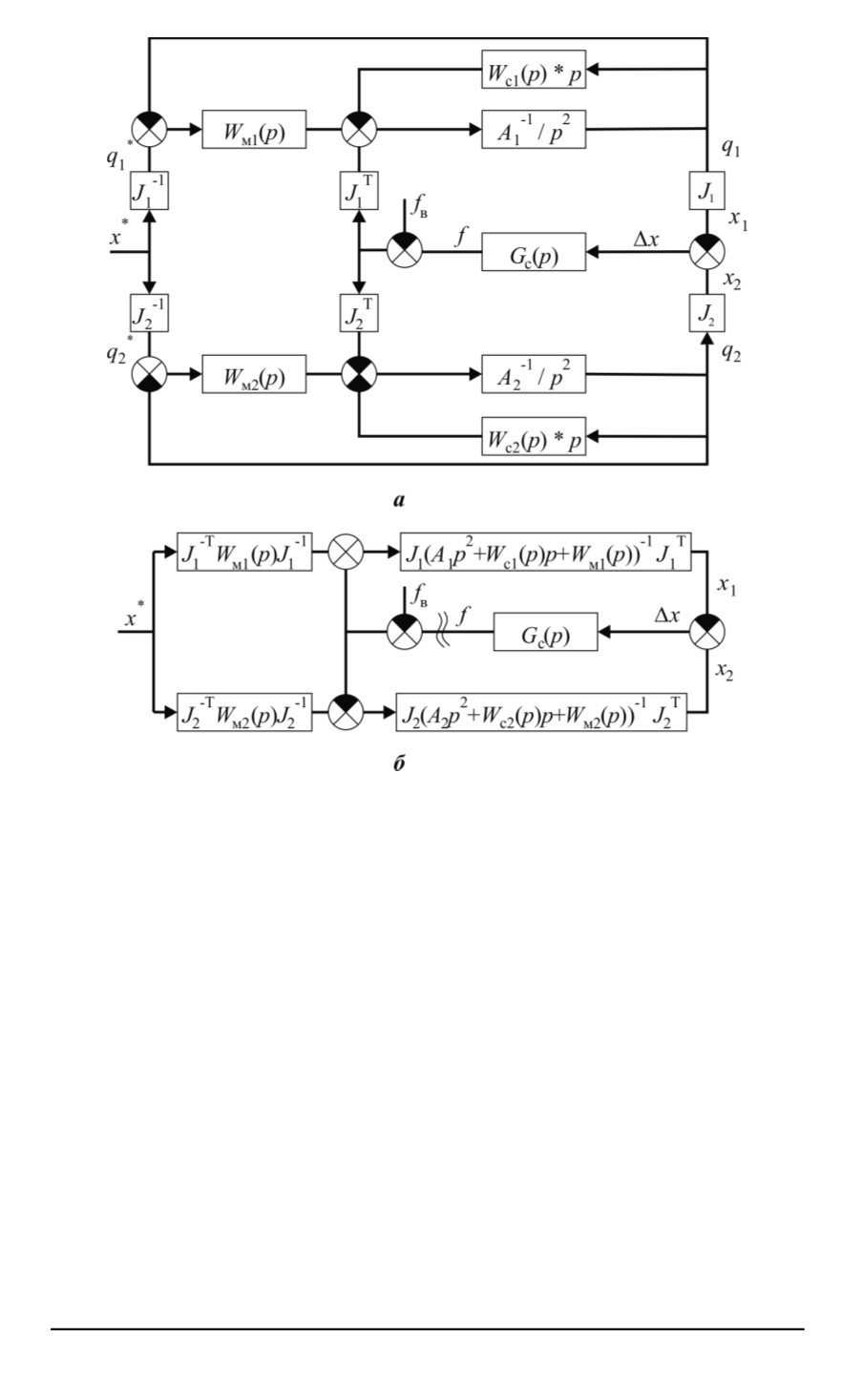
Рис. 3. Структура ИСУ двурукого МР при связанном движении
Предполагается, что СК, которые определяют положение рук (СК рук)
так позиционированы относительно их схватов, что при выполнении
операции совпадают в пространстве с СК объекта;
Δ
x
— разница меж-
ду положениями СК рук МР в декартовом пространстве;
G
c
(
p
)
— ма-
тричная ПФ, определяющая свойства контакта между МР и объектом
в виде (4) (ее параметры определены в СК объекта);
f
в
— вектор воз-
мущающих сил и моментов, действующих на захваченный объект.
В работе [6] предложено выражение для функции Найквиста, по-
зволяющей исследовать устойчивость многомерной замкнутой систе-
мы управления, в виде
Q
(
p
) = det
{
E
+
W
p
(
p
)
} −
1
,
(6)
где
W
р
(
p
)
— матричная ПФ разомкнутой системы.
Найдем ПФ разомкнутой системы управления двурукого МР при
связанном движении. Для этого преобразуем схему (рис. 3,
а
) к виду,
приведенному на рис. 3,
б
. Можем записать ПФ разомкнутой системы
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1 89


