НАВИГАЦИОННЫЕ И ГИРОСКОПИЧЕСКИЕ
СИСТЕМЫ
УДК 629.7.054.07
В. В. Л у к ь я н о в
ПРИКЛАДНЫЕ АЛГОРИТМЫ НАВИГАЦИИ
ПЕШЕХОДА
Приведены описание прикладных навигационных алгоритмов и ре-
зультаты проведенных испытаний в интегрированном со спутни-
ковой навигационной системой режиме.
Вычисление курсового угла.
Автономные методы вычисления
курсового угла.
Курсовой угол может быть определен как классиче-
ским методом с помощью бесплатформенной инерциальной навига-
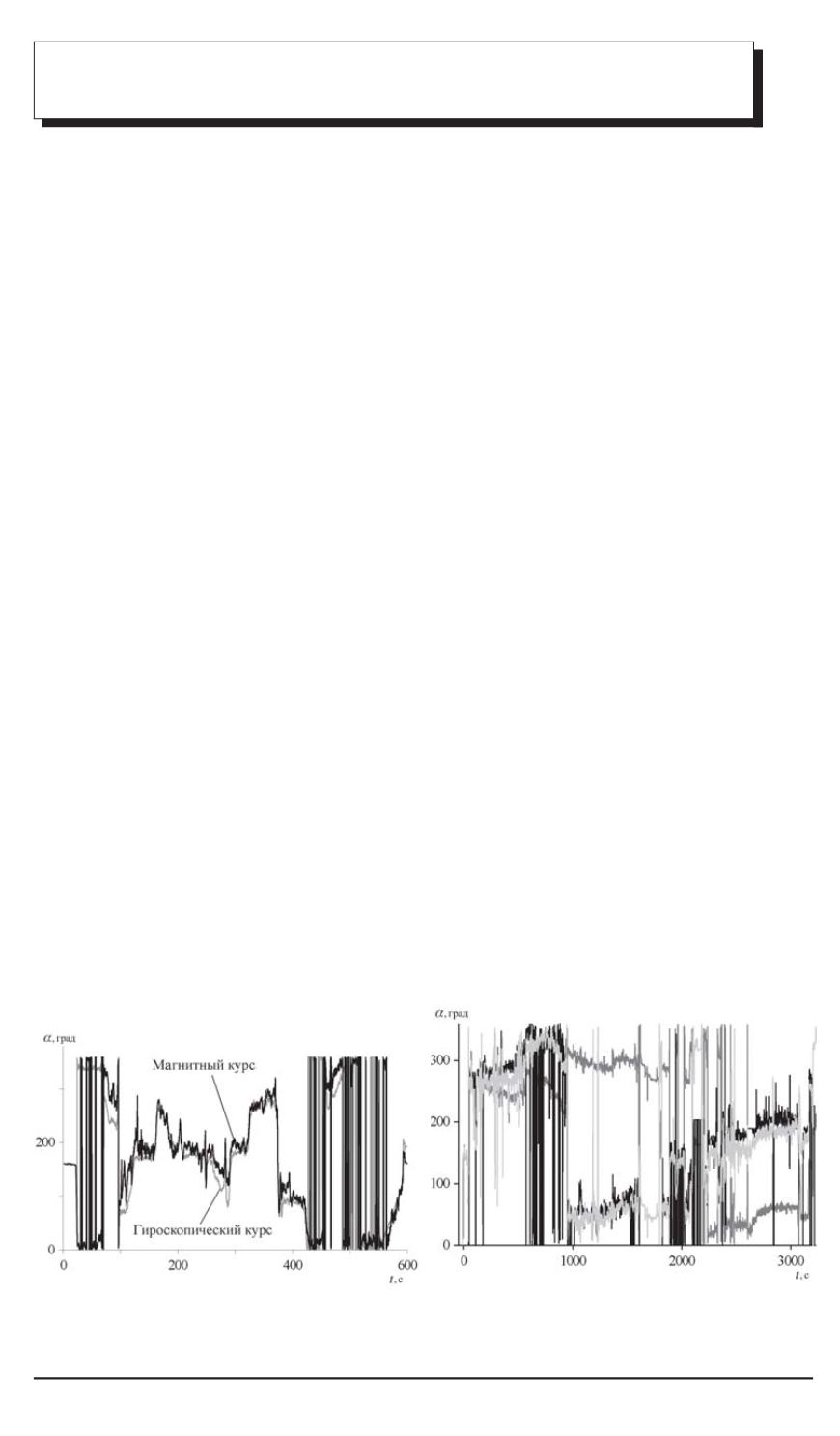
ционной системы, так и с помощью магнитного компаса (рис. 1). В
первом случае основная проблема состоит в компенсации гироско-
пических дрейфов, которые приводят к возрастающим со временем
ошибкам (см. рис. 2 — толстая черная линия).
Во втором случае используется магнитный компас, включающий
в себя триаду магнитометрических датчиков, встроенных в корпус
инерциальной навигационной системы. Магнитометры измеряют про-
екции вектора напряженности магнитного поля Земли на свои оси.
Для того чтобы измерить курсовой угол системы, необходимо пере-
считать эти измерения на оси навигационной системы координат. При
этом используются углы ориентации (крен, тангаж), полученные непо-
средственно в инерциальной системе. Горизонтальные составляющие
Рис. 1. Гироскопический и магнитный
курс
Рис. 2. Гироскопический, магнитный и
спутниковый курс в городе
86 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1


