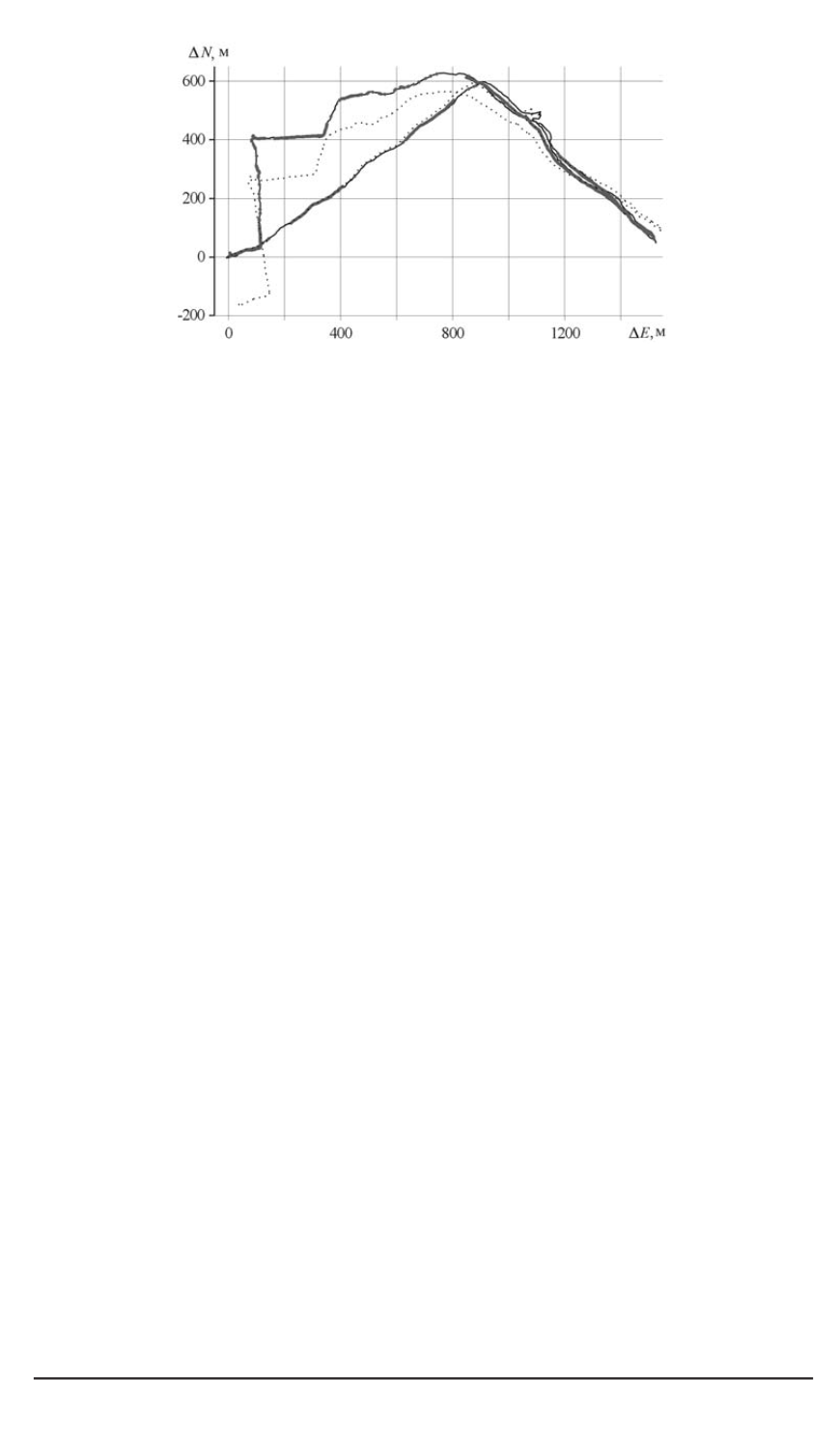
Рис. 8. Лесной маршрут
Из рис. 8 видно, что ошибка позиционирования на маршруте состав-
ляет не более 5% пройденного пути.
Ошибки определения местоположения пешеходным навигацион-
ным комплексом можно разделить на две составляющие: одна зависит
от определения длины шага, другая — от определения курса. В це-
лях повышения точности позиционирования была использована тех-
нология калибровки длины шагов и курса в реальном масштабе вре-
мени по показаниям внешнего источника информации — приемника
GPS/ГЛОНАСС.
Далее приведены типовые маршруты испытаний в различных усло-
виях. Для демонстрации точности позиционирования навигационной
системы имитировались пропадания сигналов спутниковой системы
длительностью от 3 до 10 мин.
Испытания в лесу
. Для проведения испытаний был выбран Измай-
ловский лесопарк Москвы. Было проведено 10 экспериментов. Ниже
приведен типовой маршрут испытаний.
Приведенные результаты получены в сентябре 2004 г. Продолжи-
тельность маршрута 1 ч, длина 4,4 км. Для демонстрации точности
навигационной системы имитировались пропадания сигналов от спут-
ников длительностью от 3 до 10 мин.
На рис. 8 сплошная черная линия — эталонный маршрут (показания
GPS/ГЛОНАСС), жирные серые точки — показания навигационного
комплекса на интервалах времени пропадания сигнала от спутниковой
системы (как реального, так и имитированного).
Точность определения местоположения на интервалах времени
имитации пропадания спутниковых сигналов не превышает 17 м
(4,2 % пройденного расстояния в отсутствие сигналов GPS/ГЛОНАСС).
В лесу разница магнитного курса и курса, полученного по по-
казаниям спутниковой системы, при существенной скорости ходьбы
невелика. При этом в показаниях спутниковой системы наблюдаются
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1 93


