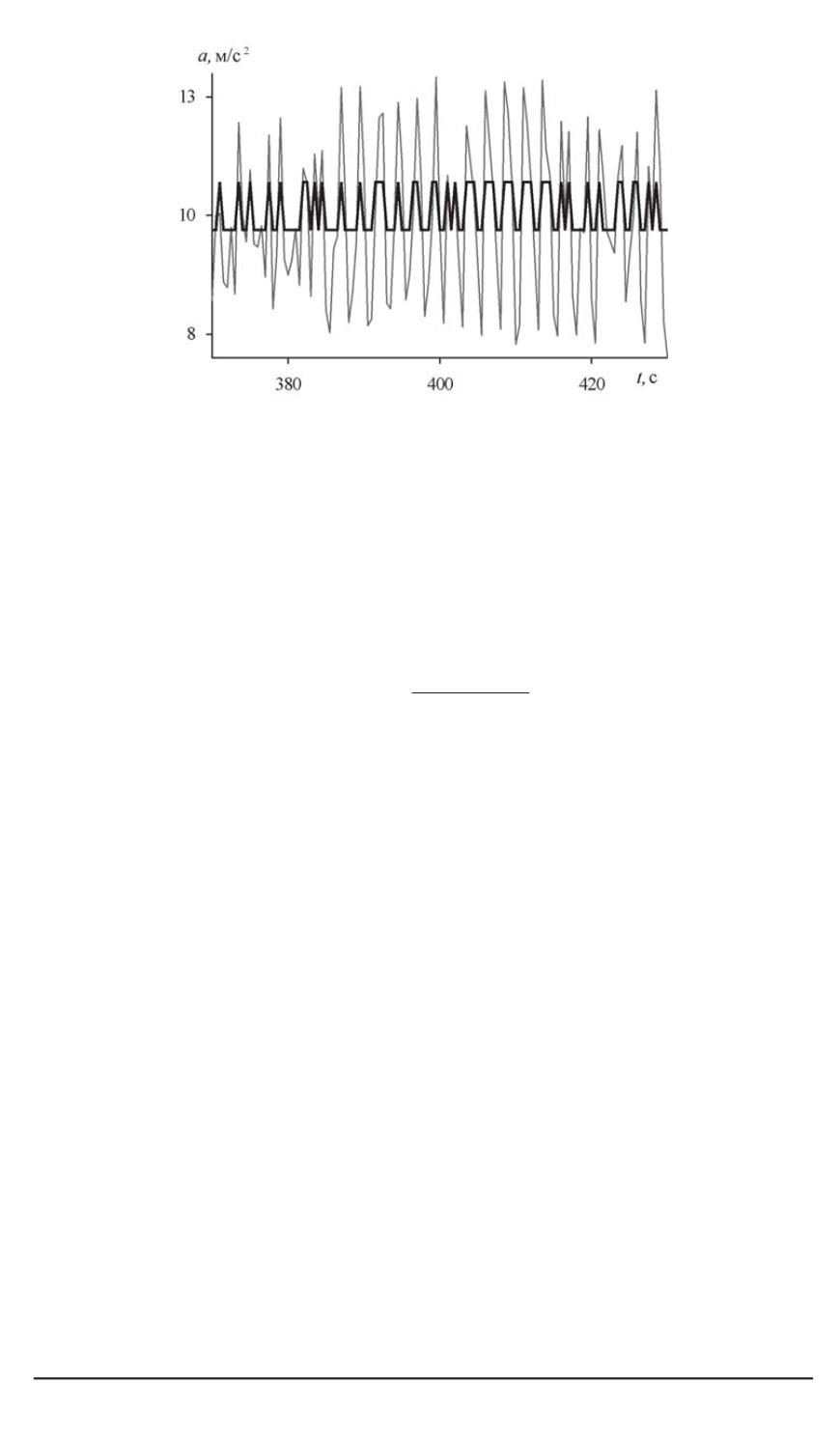
Рис. 6. Вертикальное ускорение, детектор шагов
кальные перемещения, т.е. имеет вертикальные ускорения (рис. 6). Су-
ществует корреляция этих ускорений с длиной шагов.
Сделанный шаг фиксируется в момент превышения текущего зна-
чения вертикального ускорения над некоторым пороговым значением.
О длине шага
l
ш
, т.е. о приращении пути можно судить по разности
максимального и минимального значений ускорения, измеренных в
ближайшей окрестности от этого момента:
l
ш
=
K
4
√
a
max
−
a
min
.
(3)
Данная формула получена эмпирическим путем [4], но эффективно
работает при разных режимах движения. Коэффициент
K
— индивиду-
альная характеристика. Хотя испытания показали, что у разных людей
он отличается незначительно, для увеличения точности рекомендуется
его калибровка непосредственно на маршруте по внешним измерени-
ям. На рис. 5 приведен график оценки длины сделанных пешеходом
шагов.
Алгоритм пешеходной навигации.
В соответствии с рассмотрен-
ными методиками, ошибка определения координат персональным на-
вигационным комплексом складывается из двух составляющих: первая
— из-за неправильного определения курсового угла и вторая — из-за
неточности в определении длины шагов. Для реализации указанных
методик был разработан прикладной алгоритм, блок-схема которого
приведена на рис. 7. Алгоритм состоит из четырех основных частей:
классического алгоритма бесплатформенной инерциальной навигаци-
онной системы, блоков определения курсового угла и счисления прой-
денного пути, а также блока коррекции.
В первом блоке реализован классический алгоритм бесплатфор-
менной инерциальной навигационной системы [5], в частности, опре-
деляются ее углы ориентации в географической системе координат,
90 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1


