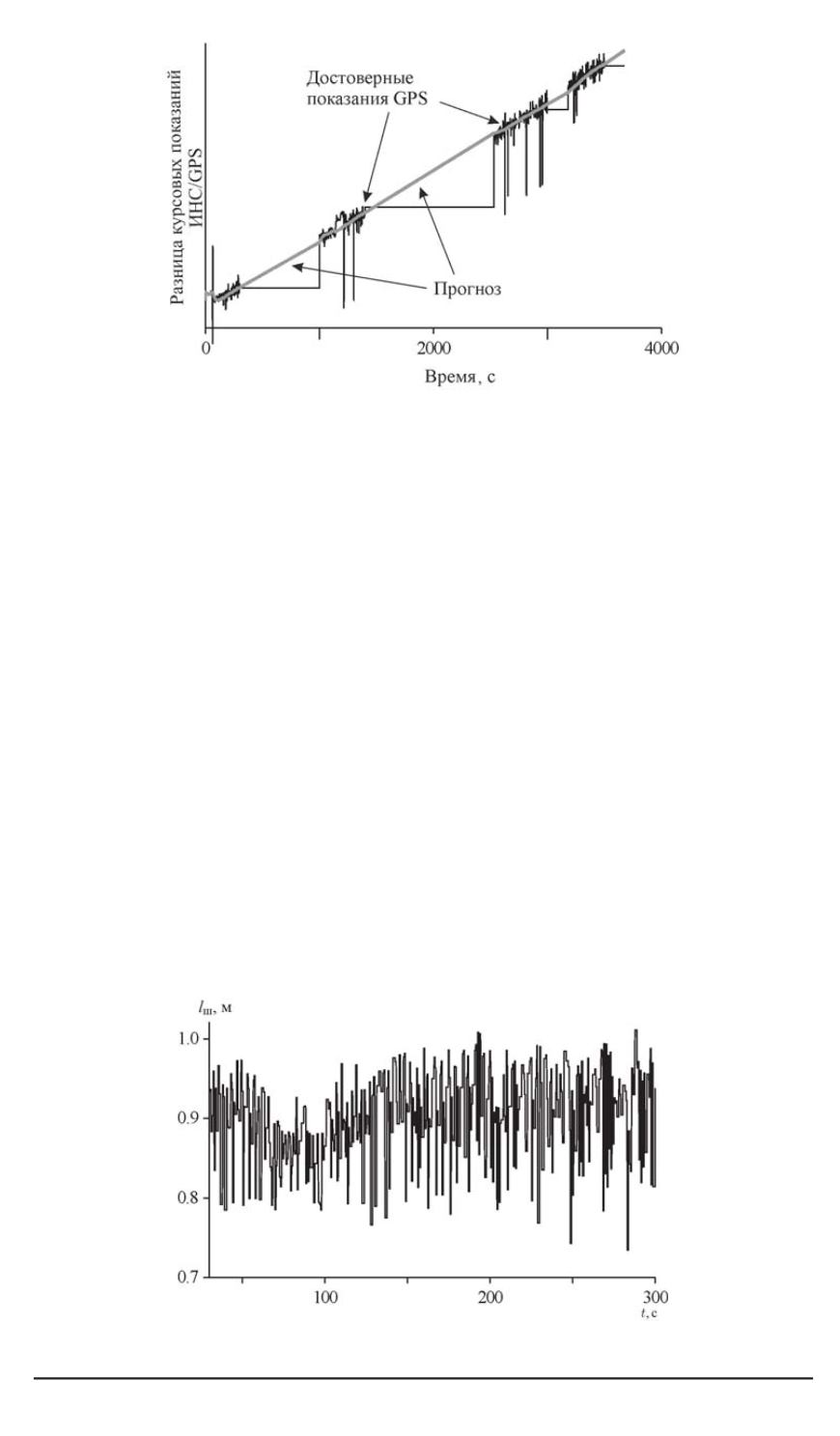
Рис. 4. Оценка ошибки определения курсового угла инерциальной навигацион-
ной системы
Достоверные измерения спутниковой системы используются для
компенсации систематической составляющей скорости дрейфа гиро-
скопической платформы инерциальной системы (рис. 4).
Счисление пути.
Классическая методика счисления пути предпо-
лагает двойное интегрирование продольного ускорения подвижного
объекта. Однако для навигации пешехода с использованием акселе-
рометров низкой точности такая методика непригодна из-за высокого
уровня погрешностей и малых значений измеряемых ускорений. В
этом случае используется альтернативный метод счисления пути.
Очевидно, что пройденное расстояние может быть вычислено пе-
ремножением количества сделанных шагов на их длину. Длина шага в
ходе прохождения маршрута может существенно изменяться (рис. 5),
поэтому ее использование как фиксированной величины может при-
водить к большим ошибкам. Следовательно, длину шага необходимо
вычислять более точно. При ходьбе тело человека совершает верти-
Рис. 5. Оценка длины шагов
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1 89


