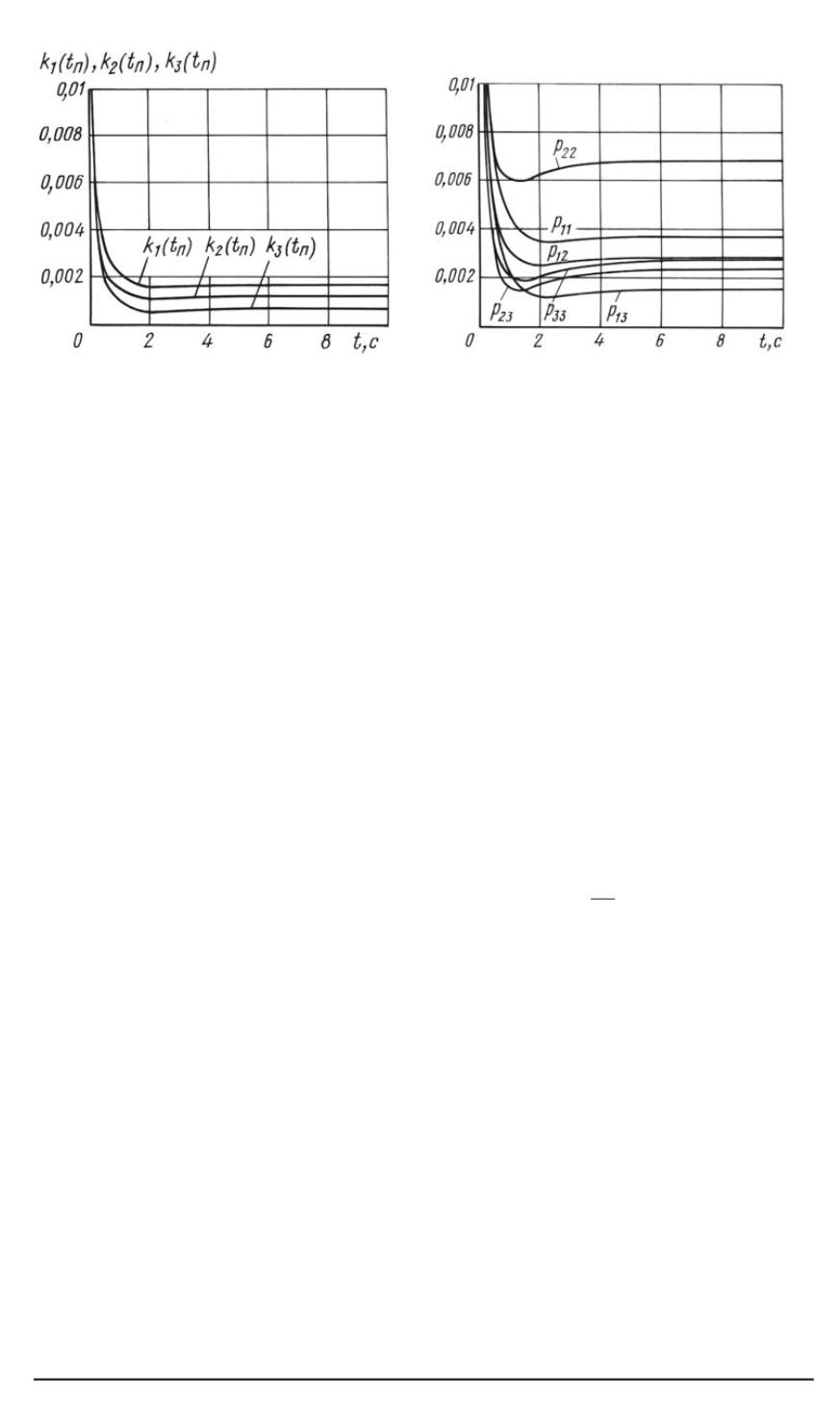
Рис. 8. Зависимость коэффициентов
усиленияв прямой цепи
k
i
от време-
ни (индекса выборки)
Рис. 9. Зависимость элементов матри-
цы ковариаций ошибок измерений
p
ij
от времени (индекса выборки)
γ
= 1
/
0
,
5
;
P
0
= 10
×
1
3
×
3
, где
1
— матрица заполненная единица-
ми, ОСШ
=
r
= 1
/
(
ργ
) = 0
,
5
. В качестве входного сигнала, как
и в случае непрерывной системы, был взят синусоидальный сигнал
x
(
t
) = sin
ϕ
(
t
) = sin [
ωt
+
ϕ
0
]
,
ω
c
= 1
,
ϕ
0
= 5
.
Время синхронизации около 9 с, что почти в 2 раза больше времени
синхронизации непрерывной системы. Это объясняется несколькими
причинами. Во-первых, качество слежения цифровой системы напря-
мую связано с шагом дискретизации
h
, а именно: чем меньше шаг,
тем выше точность слежения. Во-вторых, в вычислительной схеме
(22) используются фактически конечные разности первого порядка,
что говорит о низком порядке точности алгоритма и о его слабой вы-
числительной устойчивости.
На рис. 8, 9 показаны зависимости коэффициентов усиления
k
i
и
элементов ковариационной матрицы
P =
{
p
ij
}
i,j
=1
,
3
от времени (фак-
тически от числа обработанных результатов наблюдений). В идеале с
течением времени влияние новых наблюдений на оценки параметров
входного сигнала должно уменьшаться,
p
ij
должны стремиться к ну-
лю, также как и коэффициенты усиления в прямой цепи (в этом случае
можно говорить об отключении фильтра Калмана от источника сооб-
щения). Однако в данном случае ошибки слежения не столь малы и
k
i
,
также как и
p
ij
, стремятся к асимптотическим значениям (т.е. фильтр
Калмана продолжает работать). На рис. 10 изображены графики
k
i
и
p
ii
при различных значениях ОСШ. Как и в случае непрерывной систе-
мы, большему значению
r
соответствует большее значение коэффи-
циента усиления и меньшее значение коэффициента ковариационной
матрицы.
Выводы.
Представленная методика синтеза базируется на алгорит-
мах непрерывной и дискретной линейной оптимальной фильтрации
16 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 1


