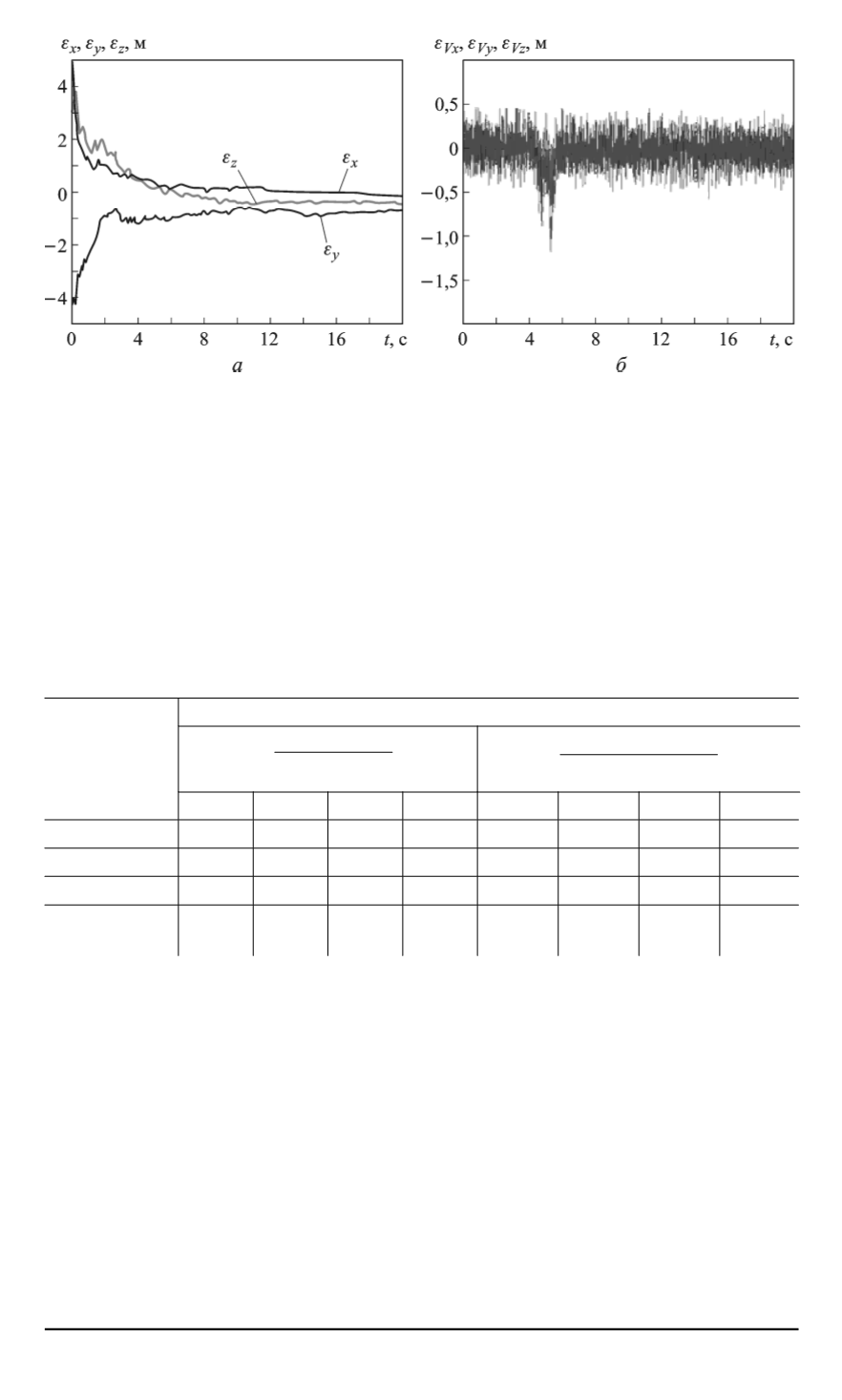
Рис. 3. Погрешности оценки координат (
а
) и компонент вектора скорости
ретранслятора (
б
)
В табл. 1 и 2 показаны характеристики предложенного алгоритма,
а также алгоритма для систем с ретрансляторами с АПС, без ПС и
бортовой НАП при значениях геометрического фактора (ГФ), равных
3,8 и 13, для шести и четырех видимых с борта объекта спутников
ГНСС соответственно.
Таблица 1
Погрешности определения координат и скорости ретранслятора
(шесть НКА ГНСС; ГФ= 3,8)
СКО
Ретранслятор
оценки координат, м
σ
xyz
=
q
σ
2
x
+
σ
2
y
+
σ
2
z
компонент вектора скорости, м/с
σ
V
=
q
σ
2
V x
+
σ
2
V y
+
σ
2
V z
σ
x
σ
y
σ
z
σ
xyz
σ
V x
σ
V y
σ
V z
σ
V
Без ПС
0,13 0,29 0,26 0,41 0,07 0,11 0,10 0,16
С МПС
0,20 0,12 0,20 0,31 0,09 0,05 0,09 0,14
С АПС
0,20 0,11 0,20 0,30 0,07 0,05 0,08 0,11
Бортовая
НАП
0,23 0,27 0,30 0,46 0,12 0,17 0,15 0,26
Из приведенных таблиц следует, что при невысоком значении ГФ
видимых с борта объекта спутников ГНСС характеристики АПРС при
работе по сигналам ретрансляторов с МПС и с АПС довольно близки
(влияние аддитивного ПС незначительно). При высоком значении ГФ
видимых с борта объекта спутников ГНСС для случая ретранслятора
с АПС погрешность оценки скорости ниже за счет дополнительного
наблюдения псевдодоплеровского сдвига частоты ПС. При этом вари-
ант с ретранслятором без ПС уступает как ретранслятору с АПС, так
и ретранслятору с МПС.
Заключение.
Предложен и синтезирован одноэтапный алгоритм
фильтрации когерентных сигналов координат и компонент вектора
22 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1


