














 6 / 19
6 / 19

Е.М. Воронов, Ю.Г. Оболенский, Д.И. Чеглаков
134
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 3
дывание не более 20
°
в частотном диапазоне колебаний конуса. Если выбирать
ограничения по времени переходного процесса на основе характеристик
1
( ),
M p
то
п.п
0, 6
t
≤
с. Следует отметить, что точное обеспечение данных характеристик
не является обязательным при условии выполнения стыковки штанги и конуса.
L1 адаптивное управление для скалярного случая как основа синтеза алго-
ритмов автоматического управления беспилотным летательным аппаратом.
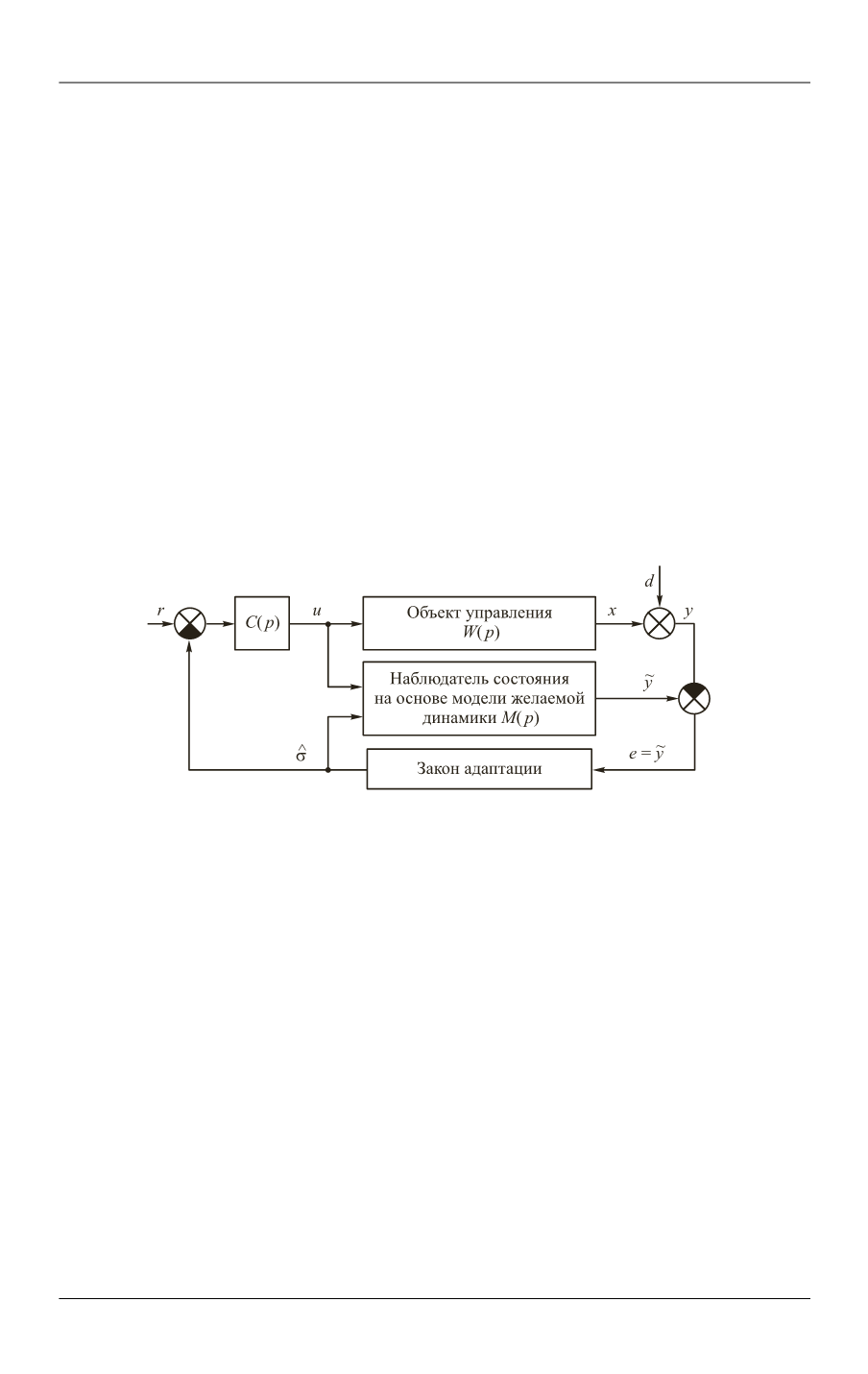
Рассматриваемая L1 адаптивная система управления (рис. 4) относится к классу
сигнальных систем прямого действия с идентификатором [6–8], но ее существен-
ным отличием от аналогичных систем является наличие фильтра низких частот
С
(
р
) [6], ограничивающего частотный диапазон управляющего сигнала. Общая
структура контура стабилизации, построенного на основе принципов L1 адаптив-
ного управления (см. рис. 4), включает в себя объект управления, модель желае-
мой динамики объекта, алгоритм адаптивного управления. При управлении дви-
жением вокруг центра масс:
= ω ω ω
з
з
з
,
,
х у z
r
,
= ω ω ω
,
,
,
х у z
y
d
— аддитивное
возмущение, эквивалентные особенности динамики рулевого привода, нелиней-
ные свойства объекта управления и внешние возмущения.
Рис. 4.
Общая схема адаптивного контура управления
После декомпозиции движения БЛА на продольное и боковое, короткопе-
риодическое и длиннопериодическое, а также с учетом развязки каналов крена
и рысканья объект управления описывается системой линейных стационарных
дифференциальных уравнений. Тогда для каждого канала угловой скорости
ω ω ω
( ,
,
)
х у z
имеет место динамическая зависимость
(
)
=
1
, , ,
x f t x u
(7)
где
x
— выходной сигнал канала (угловая скорость) линейной системы;
u
—
управляющий сигнал
δ
э
( ,
δ
н
,
δ
в
).
Замечание 1.
Выражение (7) справедливо для случая идеального привода с
передаточной функцией, равной единице. Однако реальное исполнительное
устройство системы управления (рулевой гидравлический привод) имеет соб-
ственную нелинейную динамику, и текущий управляющий сигнал
н
u
отличает-
ся от заданного сигнала
u
:
(
)
=
н 2
н
, , .
u f t u u
(8)