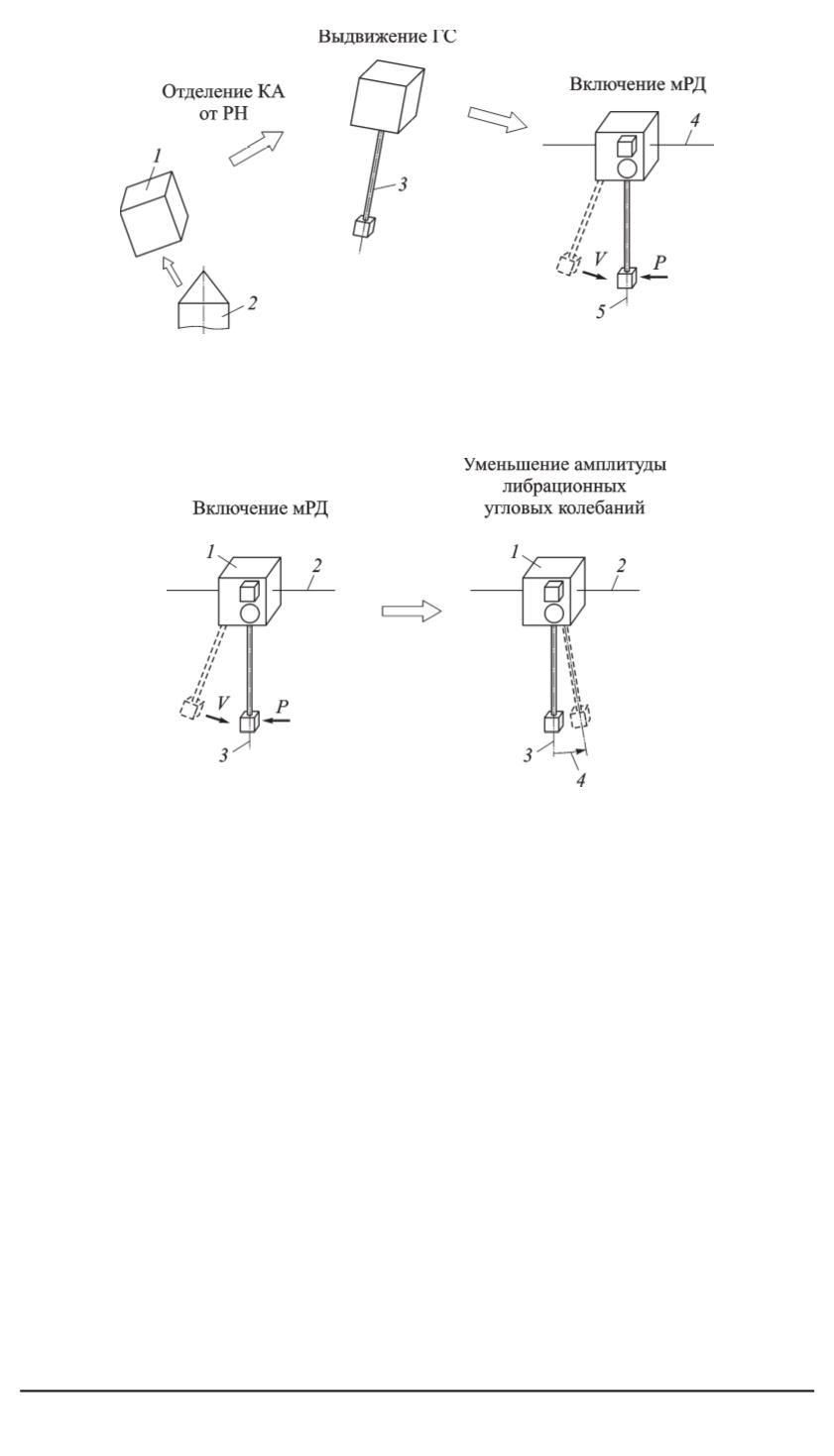
Рис. 2. Схема предварительного успокоения КА:
1
— КА;
2
— РН;
3
— ГС;
4
— орбита КА;
5
— местная вертикаль;
V
— направление
движения блока мРД;
P
— направление вектора тяги мРД
Рис. 3. Схема стабилизации КА:
1
— КА;
2
— орбита КА;
3
— местная вертикаль;
4
— максимум отклонения ГС от
положения динамического равновесия;
V
— направление движения блока мРД;
P
—
направление вектора тяги мРД
регулирования, потребного силового импульса, простоты программно-
аппаратной реализации блока управления включением мРД, времени
успокоения КА) проведение данной операции.
Аналогично решается задача поддержания заданного положения
главной оси инерции КА в пространстве, т.е. требуемой стабилиза-
ции (рис. 3). Использование мРД существенно уменьшает амплитуду
либрационных угловых колебаний и увеличивает быстродействие си-
стемы стабилизации. При этом, как правило, задействуется меньшее
число двигателей (поскольку уровень возмущений обычно ниже, чем
при успокоении КА).
При выполнении операции ориентации (переориентации) КА мРД
включается в момент максимального отклонения продольной оси
штанги ГС от положения ее динамического равновесия, совпадающе-
го с местной вертикалью (рис. 4). В этом случае главная ось инерции
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 1 63


