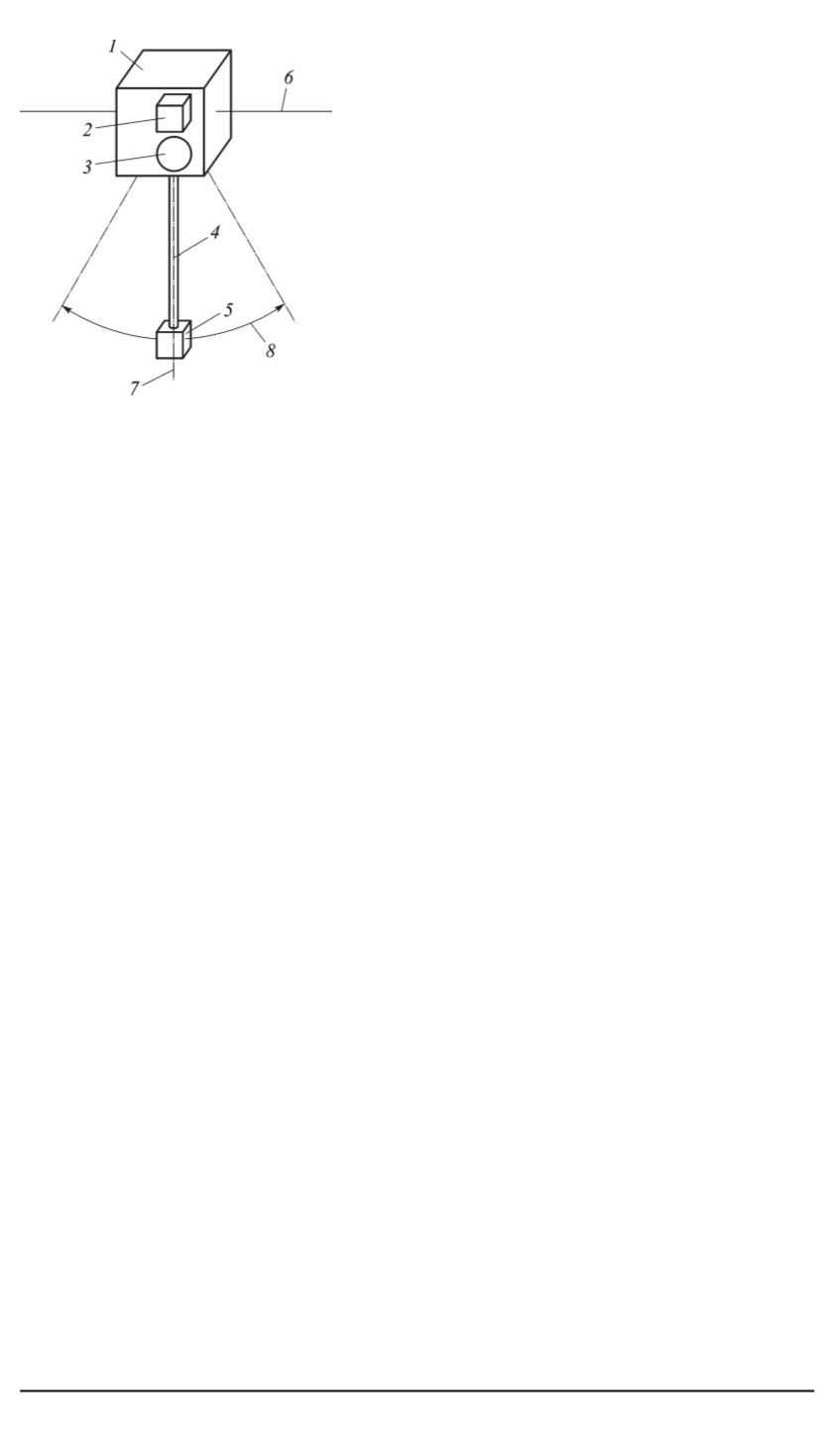
Рис. 1. Принципиальная схема
КА:
1
— КА;
2
— блок управления
мРД;
3
— демпфер;
4
— ГС;
5
— блок мРД;
6
— орбита КА;
7
— местная вертикаль (положение
динамического равновесия ГС);
8
— максимум отклонения ГС от
положения динамического рав-
новесия
направлению к центру масс планеты. Ак-
тивная подсистема ориентации и ста-
билизации КА представляет собой блок
мРД. Этот блок размещается на даль-
нем конце ГС, что соответствует наи-
большему значению реактивного момен-
та от двигателей относительно центра
масс аппарата.
Преимущества предлагаемой актив-
но-пассивной системы заключаются в
малых массо- и энергозатратах при про-
цессах успокоения, ориентации и ста-
билизации КА, длительном времени ее
штатной работы (за счет пассивной под-
системы), эффективности применения
мРД для спутников наноразмерности,
малой стоимости и высокой надежности
по сравнению с традиционными актив-
ными системами.
Принципиальная схема варианта КА,
реализующего предложенную систему стабилизации и ориентации,
приведена на рис. 1.
После отделения КА от последней ступени РН (РБ) выполняется
операция его успокоения. В данном случае осуществляется разверты-
вание ГС. При этом увеличиваются значения инерционных параметров
и, соответственно, уменьшаются значения приобретенных вследствие
разделения паразитных угловых скоростей. Диссипирующие свойства
демпфера обеспечивают последующее рассеяние энергии возмуще-
ний. Однако при отсутствии внешнего трения этот процесс чрезвы-
чайно растянут во времени и обладает свойством самоподдерживать-
ся вследствие непрерывного изменения направления вектора местной
вертикали при орбитальном движении КА.
Применение предложенной активно-пассивной системы предвари-
тельного успокоения, ориентации и стабилизации позволяет наноспут-
нику осуществлять успокоение посредством включения мРД (одиноч-
ного или залпового — в зависимости от располагаемой тяги единич-
ного двигателя и потребного для успокоения КА силового импульса),
размещаемых в блоке на дальнем относительно центра масс КА конце
ГС (см. рис. 1). Вектор тяги каждого мРД перпендикулярен продольной
оси ГС (из условия максимизации момента силы). При этом двигате-
ли включаются в момент пересечения дальним относительно центра
масс КА концом ГС с блоком мРД местной вертикали (рис. 2), что обес-
печивает наилучшее (с точки зрения расхода рабочего тела, точности
62 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 1


