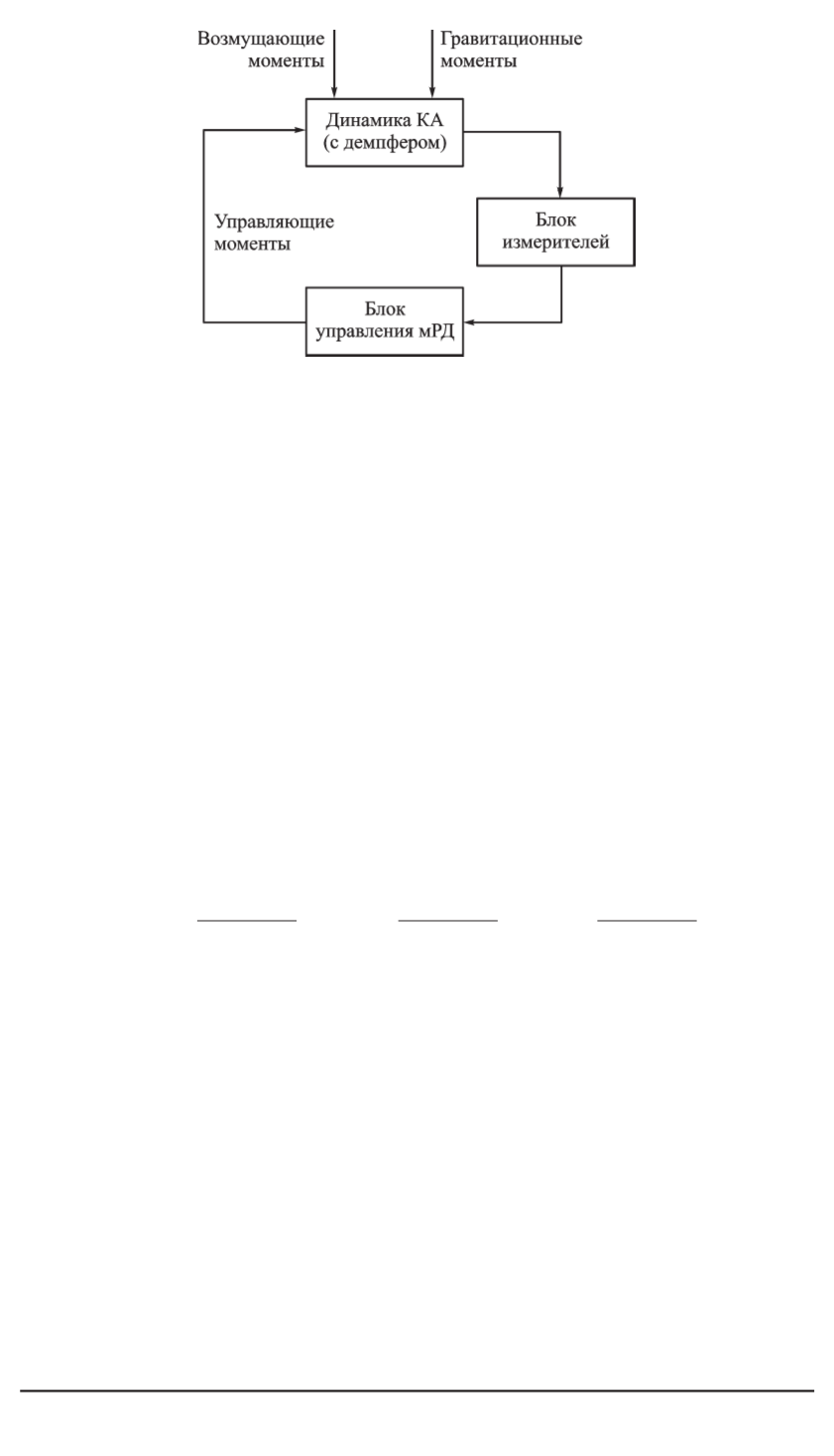
Рис. 6. Функциональная схема системы управления углового движения КА
его центра масс. При этом управляющие моменты отсутствуют и за-
действуется лишь пассивная подсистема стабилизации КА с диссипа-
цией энергии углового движения демпфером. Этот режим применяется
в случае отсутствия необходимости в длительной точной ориентации
на планету. В этом режиме энергозатраты системы минимальны.
Режим “П” используется после отделения КА от РН (РБ). При
задействовании режима “П” в первую очередь осуществляется развер-
тывание ГС. Затем блок измерителей отслеживает момент пересечения
продольной осью ГС местной вертикали, и в этот момент блок упра-
вления мРД задействует потребное для предварительного успокоения
КА число двигателей (см. рис. 2).
Следующая методика оценки числа задействуемых двигателей в
режиме “П” может быть использована в алгоритмах работы блока
управления мРД. Число задействуемых мРД определяется по следую-
щим формулам:
N
γ
=
J
x
(
ω
∗
x
)
2
2
l
мРД
p
мРД
;
N
ψ
=
J
y
ω
∗
y
2
2
l
ψ
мРД
p
мРД
;
N
ϑ
=
J
z
(
ω
∗
z
)
2
2
l
мРД
p
мРД
.
(8)
С помощью формул (8) при известных параметрах КА и каждо-
го мРД можно оценить необходимое для процесса предварительного
успокоения КА число двигателей. Информация о значениях (изме-
ряемых ДУС) угловых скоростей КА
ω
∗
x
, ω
∗
y
, ω
∗
z
в проекциях на оси
связанной СК передается в блок управления мРД. Момент включения
двигателей блоком управления мРД определяется по показаниям ДУ:
|
γ
∗
| ≤
γ
пор
;
|
ψ
∗
| ≤
ψ
пор
;
|
ϑ
∗
| ≤
ϑ
пор
,
где
γ
∗
, ψ
∗
, ϑ
∗
— значения углов, измеряемых ДУ;
γ
пор
, ψ
пор
, ϑ
пор
— по-
роговые значения углов поворота, необходимые для работы соответ-
ствующих алгоритмов в блоке управления мРД.
70 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 1


