Рис. 4. Алгоритм ART2 реконструкции оптических параметров цели
ветствующего
(
n
1
, n
2
)
-му пикселю на
k
-м снимке при условии, что
δ
k
[
n
]
6
= 0
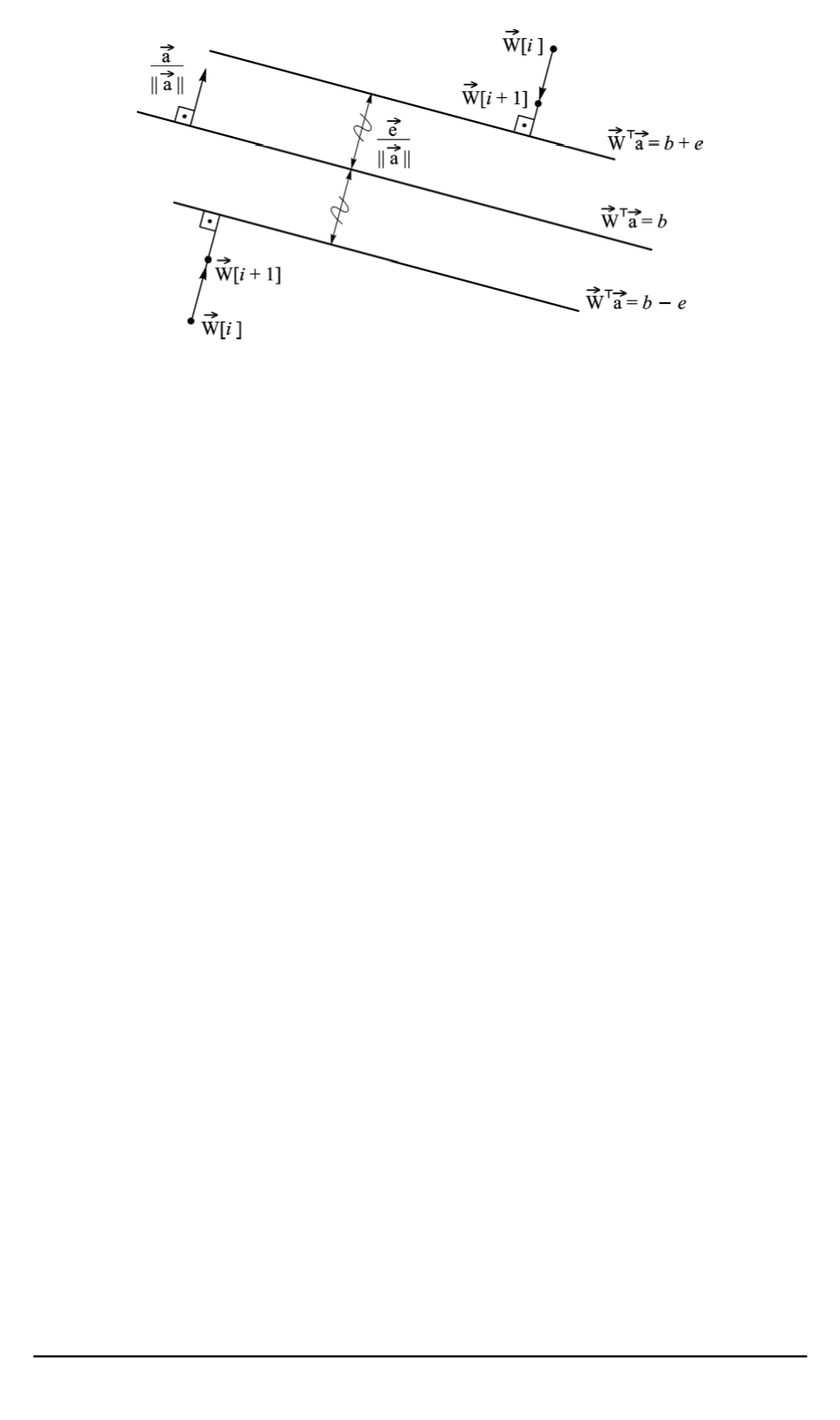
. Эта гиперплоскость является осью симметрии полосы
ε
до-
пустимых ошибок
±
e
(
k
)
n
решения СЛН для текущего примера. Скаля-
ры
~W
т
[
i
]
~a
(
k
)
n
−
d
(
k
)
j
.
~a
(
k
)
n
,
j
= (2
n
−
1)
,
2
n
, определяют евклидо-
вы расстояния от текущей точки с радиусом-вектором
~W
[
i
]
до границ
полосы
ε
в виде гиперплоскостей
~W
т
~a
(
k
)
n
=
b
(
k
)
n
−
e
(
k
)
n
и
~W
т
~a
(
k
)
n
=
b
(
k
)
n
+
+
e
(
k
)
n
. Расстояния измеряют по нормалям к граничным гиперплоско-
стям. Функция ошибок
δ
(
k
)
j
~W
[
i
] =
1
,
если
(
−
1)
j
~W
т
[
i
]
~a
(
k
)
n
−
d
(
k
)
j
>
0
,
0
,
если
(
−
1)
j
~W
т
[
i
]
~a
(
k
)
n
−
d
(
k
)
j
<
0
,
реализует принцип подкрепления–наказания. Если точка
~W
[
i
]
находит-
ся за пределами полосы
ε
, то функция
δ
(
k
)
j
~W
[
i
] = 1
и оптические
параметры корректируют (фаза наказания) так, чтобы вектор
~W
[
i
+ 1]
приблизился к границам или попал внутрь полосы допустимых оши-
бок решения СЛН. Если точка с радиусом-вектором
~W
[
i
]
находится
внутри полосы
ε
, то функция
δ
(
k
)
j
~W
[
i
] = 0
и
~W
[
i
+ 1] =
~W
[
i
]
, т.е.
оптические параметры цели не корректируют (фаза подкрепления).
Существенной проблемой является обеспечение условий сходимо-
сти алгоритма Качмажа к компромиссному решению несовместной
СЛН (4). Алгоритм (5) регуляризуют вследствие введения параметра
релаксации
μ
6
λ
6
2
−
μ
[3]. Здесь
μ
— положительная достаточ-
но малая постоянная, которая задает значение шага коррекции векто-
ра
~W
[
i
]
в долях расстояний от границ полосы
ε
. Очевидно, что для
значения
λ
= 1
последующее приближение
~W
[
i
+ 1]
вектора оптиче-
ских параметров цели представляет собой ортогональную проекцию
116 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1


