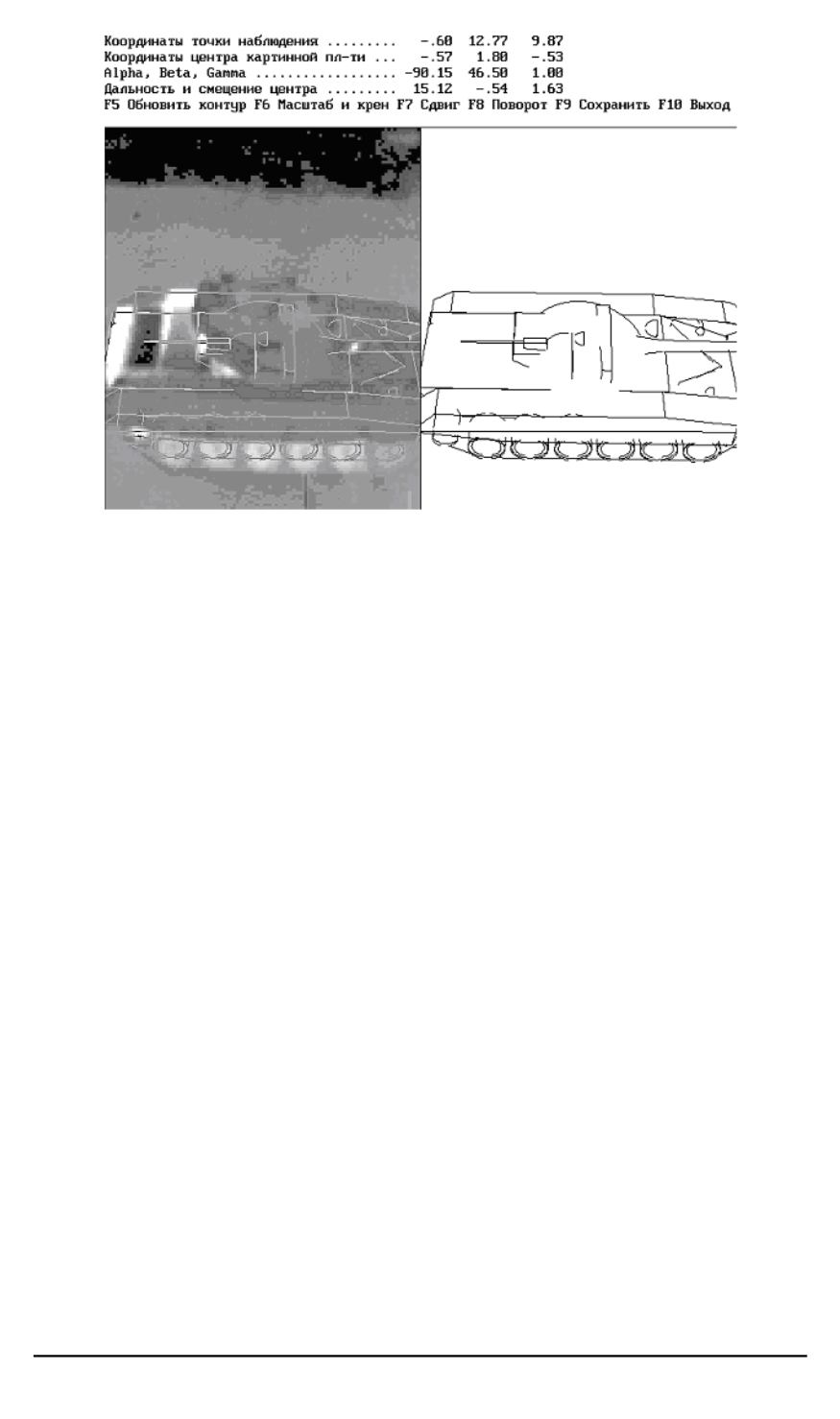
Рис. 3. Ракурсный снимок борта танка Т-72 и совмещенная с ним модель гео-
метрического образа
L
2
= (2
N
+
M
)
больше (или равно) числа уравнений
L
1
=
K
X
k
=1
L
1
k
.
Здесь
L
1
k
=
N
X
n
=1
δ
k
[
n
]
— число элементов поверхности цели, немаски-
руемых другими элементами по отношению к приемнику излучения
для условий
k
-й съемки. В этом малоракурсном случае основные ис-
точники погрешностей реконструкции вектора-столбца
~W
=
n
w
1
[1]
, . . . , w
1
[
N
]
, Ln
(
w
3
[1])
, . . . ,
Ln
(
w
3
[
N
])
, Ln
(
w
4
[1])
, . . . , Ln
(
w
4
[
M
])
o
т
оптических параметров объекта локации определяются ошибками
измерений яркостей
B
(
k
)
[
m
1
, m
2
]
экспериментальных изображений,
ошибками интерполяции значений яркостей
B
k
[
n
]
на растр модельно-
го изображения и ошибками линеаризации СУЭБ.
Очевидно, что в такой ситуации система уравнений (1) может быть
несовместной. Ее точное алгебраическое решение, даже если бы оно
существовало, не представляет большой ценности для реконструк-
ции вектора
~W
. Наибольший интерес представляет решение, удовле-
творяющее принципу реализуемости [9]. Согласно этому принципу
в пространстве параметров
~W
ищется точка (решение), минимально
уклоняющаяся от всех гиперплоскостей (экспериментальных изобра-
жений), заданных уравнениями (1).
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1 113


