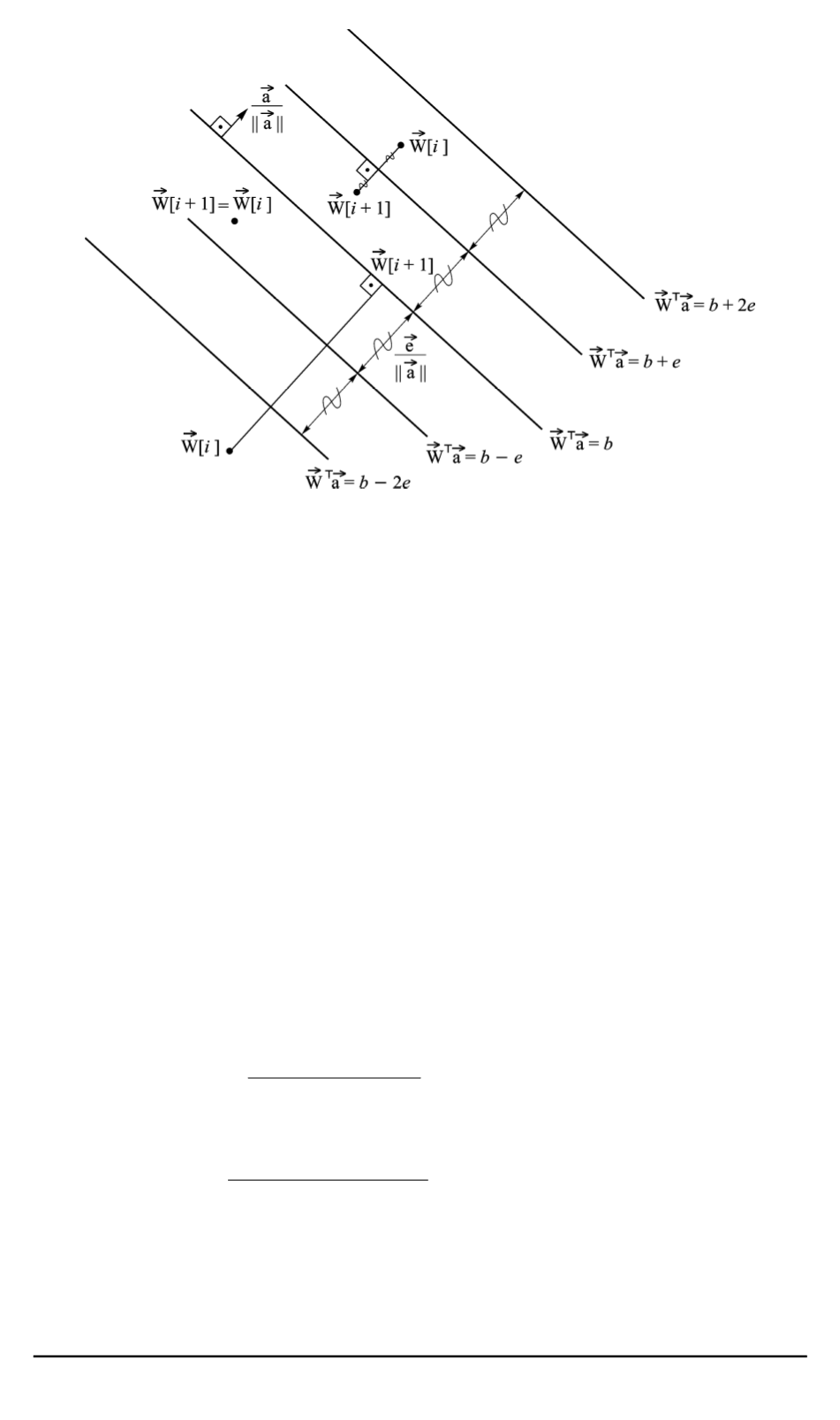
Рис. 6. Алгоритм ART3 реконструкции оптических параметров цели
В этом алгоритме гиперплоскость
~W
т
~a
(
k
)
n
=
b
(
k
)
n
каждого обуча-
ющего примера ограничена двумя зонами. Внутренняя полоса допу-
стимых ошибок
±
e
(
k
)
n
имеет ширину
2
e
(
k
)
n
.
~a
(
k
)
n
. Ширина внешней
зоны в 2 раза больше (рис. 6). Реконструкцию вектора
~W
оптических
параметров цели выполняют по следующим правилам:
если текущее приближение параметров лежит на внутренней по-
лосе допустимых ошибок, то это приближение не корректируют, т.е.
~W
[
i
+ 1] =
~W
[
i
]
,
если
−
e
(
k
)
n
6
~W
т
[
i
]
~a
(
k
)
n
−
b
(
k
)
n
6
e
(
k
)
n
;
если текущее приближение параметров лежит за пределами вну-
тренней зоны, но на внешней полосе, то это приближение коррек-
тируют с помощью зеркального отражения относительно ближайшей
границы внутренней зоны, т.е.
~W
[
i
+ 1] =
~W
[
i
]
−
Δ
(
k
)
n
~W
[
i
]
~a
(
k
)
n
~a
(
k
)
n
;
(6)
Δ
(
k
)
n
~W
[
i
] =
−
2
D
(
k
)
n
(
~W
[
i
])+
e
(
k
)
n
~a
(
k
)
n
,
если
−
2
e
(
k
)
n
<D
(
k
)
n
~W
[
i
]
<
−
e
(
k
)
n
,
2
D
(
k
)
n
~W
[
i
]
−
e
(
k
)
n
~a
(
k
)
n
,
если
e
(
k
)
n
< D
(
k
)
n
~W
[
i
]
<
2
e
(
k
)
n
,
где
D
(
k
)
n
~W
=
~W
т
~a
(
k
)
n
−
b
(
k
)
n
— дискриминантная функция текущего
обучающего примера
n
~a
(
k
)
n
;
b
(
k
)
n
o
;
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1 119


