Рис. 7. Модель эталонного жеста в
виде буквы Z
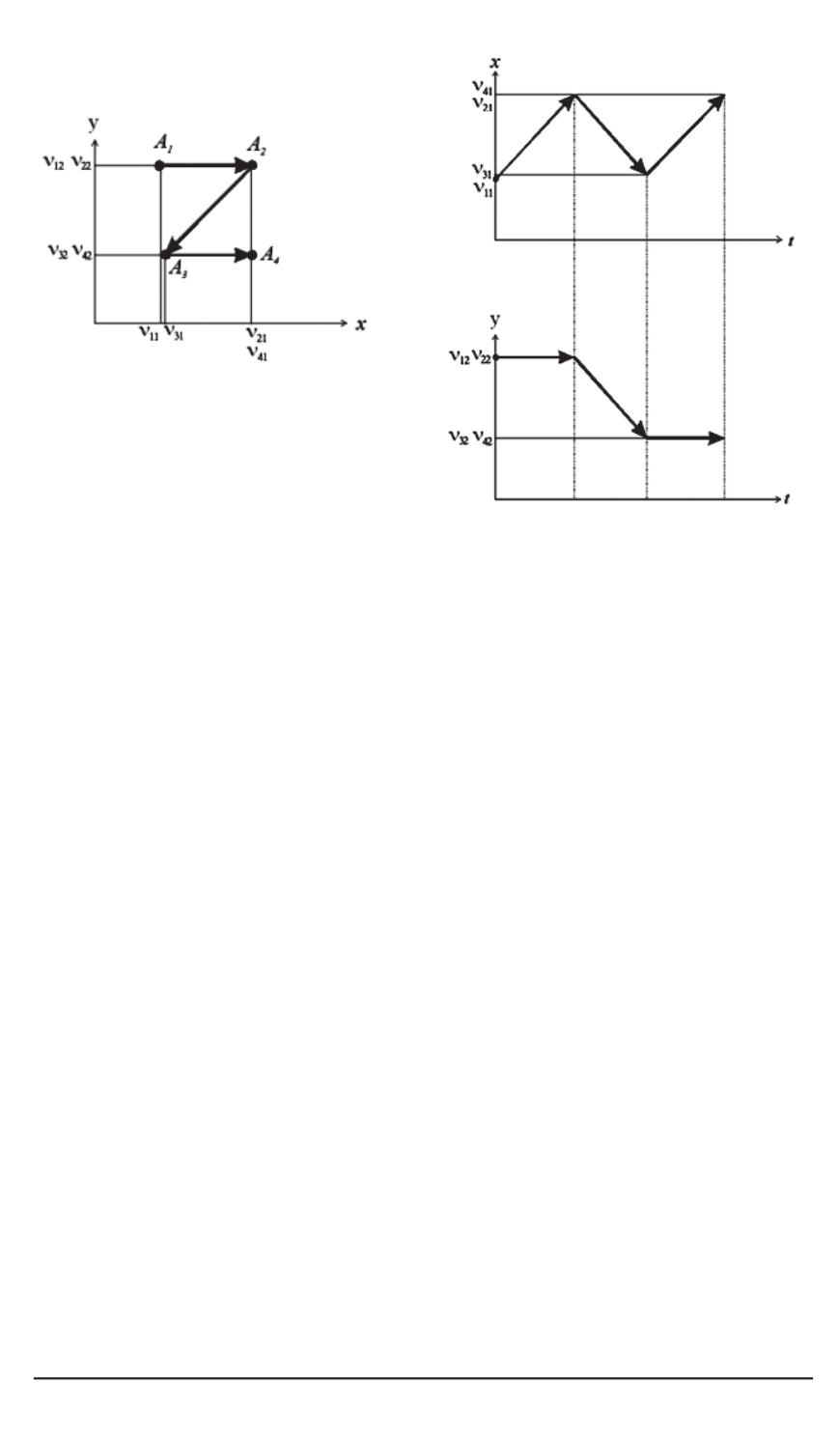
Рис. 8. Проекции модели эталонного
жеста
учесть время, вместо модели, показанной на рис. 7 для случая двумер-
ного пространства, будем использовать также модели, показанные на
рис. 8, полученные в результате проекции траекторий движения цен-
тров тяжести соответственно на оси абсцисс и ординат. В общем слу-
чае
m
-мерного пространства число таких моделей
y
i
(
t
)
(
i
= 1
, . . . , m
)
равно
m
.
Постановка задачи распознавания жестов.
Рассмотрим одну из
моделей
y
i
(
t
)
какого-либо жеста. Значение
y
i
(
t
)
в некоторый момент
времени будем называть
отсчетом
y
i
(
t
)
. Число отсчетов совпадает с
числом кластеров в алгоритме кластеризации
с
-средних.
Последовательность
n
+ 1
отсчетов
Y
i
[
t
0
, t
n
] =
{
y
i
(
t
0
)
, y
i
(
t
1
)
, y
i
(
t
2
)
,
. . . , y
i
(
t
n
)
}
i
-й модели одного и того же жеста в течение нескольких
последовательных моментов времени
t
0
, t
1
, t
2
, . . . , t
n
(в течение вре-
менного интервала [
t
0
, t
n
]) назовем
сигналом
. Множество отсчетов
K
(
t
) =
{
y
1
(
t
)
, y
2
(
t
)
, . . . , y
m
(
t
)
}
m
различных моделей одного и того
же жеста в момент времени
t
назовем
кадром
. Последовательность
кадров
K
(
t
0
)
, K
(
t
1
)
, . . . , K
(
t
n
)
, получаемых по
m
моделям одного и
того же жеста в течение нескольких моментов времени
t
0
, t
1
, t
2
, . . . , t
n
(в течение временного интервала [
t
0
, t
n
]), назовем
потоком кадров
.
Совокупность
n
+ 1
сигналов
Y
1
[
t
0
, t
n
]
, Y
2
[
t
0
, t
n
]
, . . . , Y
n
[
t
0
, t
n
], отно-
сящихся к одному временному интервалу [
t
0
, t
n
], назовем
потоком
сигналов
.
Сопоставим каждому отсчету
y
j
(
t
i
)
одного и того же сигнала со-
стояние
b
j
(
t
i
)
конечного автомата
M
j
. Введем функцию выходов ко-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 3 63


