x
R
=
N
i
=1
x
i
N
, y
R
=
N
i
=1
y
i
N
,
где
x
i
,
y
i
— координаты
i
-го пикселя, принадлежащего кисти руки;
N
—
число таких пикселей. На рис. 4 центр тяжести показан крестиком.
При построении эталонной траектории движения кисти или дру-
гого объекта один и тот же жест повторятся многократно. Траектории
движения каждого повторяемого жеста при этом не совпадают. На-
пример, если жесты имеют вид буквы
Z
, то вместо одной траектории
можем иметь множество траекторий, показанных на рис. 5. По осям
x
и
y
здесь отложены координаты пикселей.
Формирование моделей эталонных жестов.
Каждое множество
траекторий манипулятивных жестов имеет свои характерные особен-
ности. Так, если жесты имеют вид буквы
Z
, то имеется участок траек-
торий, параллельный оси
x
и получаемый во времени слева направо,
затем участок траекторий, получаемый во времени сверху вниз при-
мерно под 45
◦
к оси, и затем опять участок траекторий, параллельный
оси
x
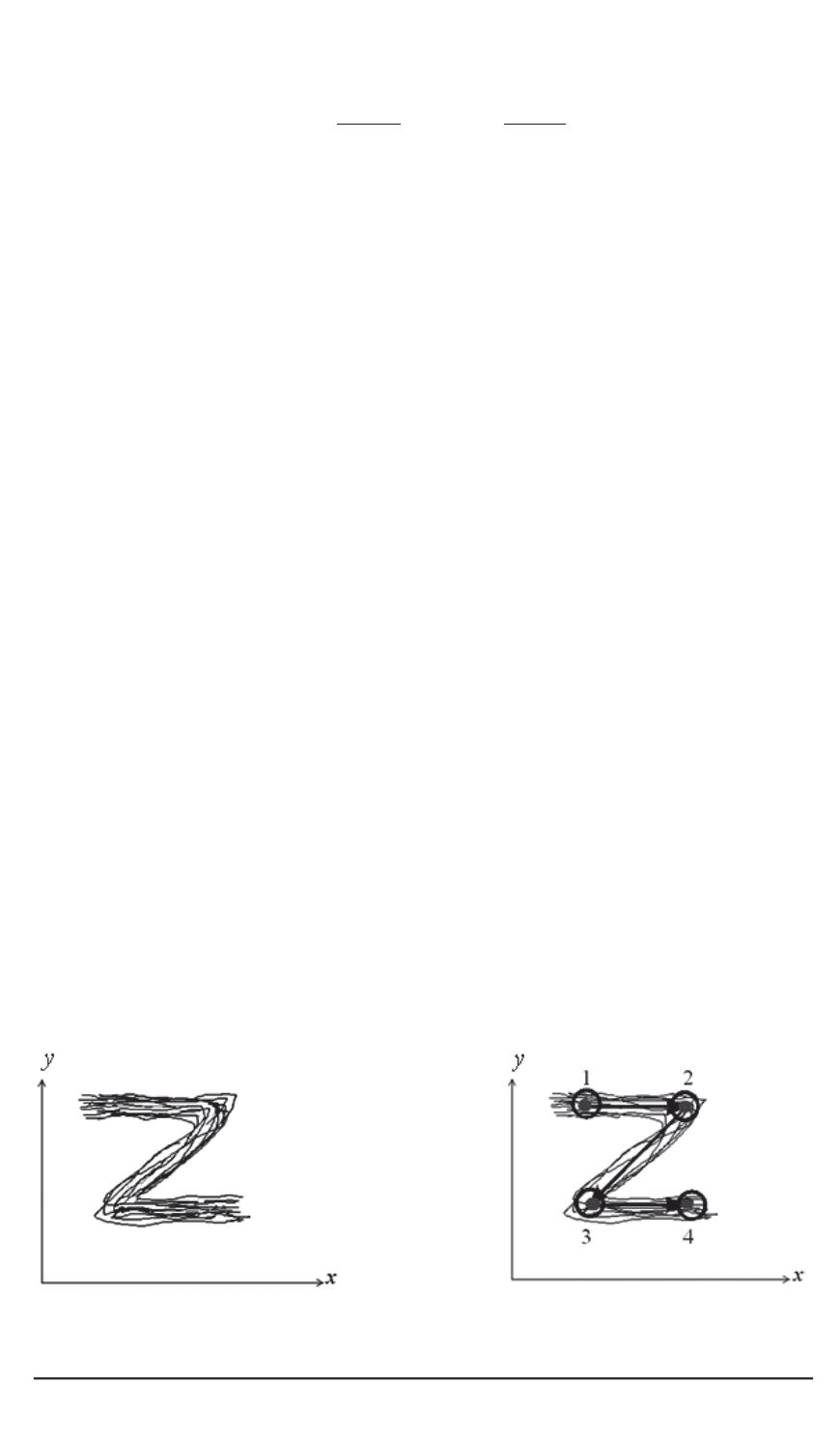
и получаемый во времени справа налево. Обобщенно траекто-
рию движения всех жестов, имеющих вид буквы
Z
, можно предста-
вить в виде графа, показанного на рис. 6.
Вершина
1
этого графа объединяет множество точек, принадлежа-
щих началу траекторий, вершины
2
и
3
соответствуют множествам
точек перегиба траекторий, вершина
4
объединяет множество точек
концов траекторий, дуги графа указывают на направление движения
центра тяжести объекта по траекториям. Этот граф может служить
основой для построения модели эталонного жеста.
Спрашивается, как представлять подобные графы — как модели
эталонных жестов? как их алгоритмически формировать для различ-
ных жестов, чтобы можно было в дальнейшем использовать их для
распознавания?
Рис. 5. Траектории жеста, по-
вторенного несколько раз
Рис. 6. Граф модели эталонного
жеста
60 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 3


