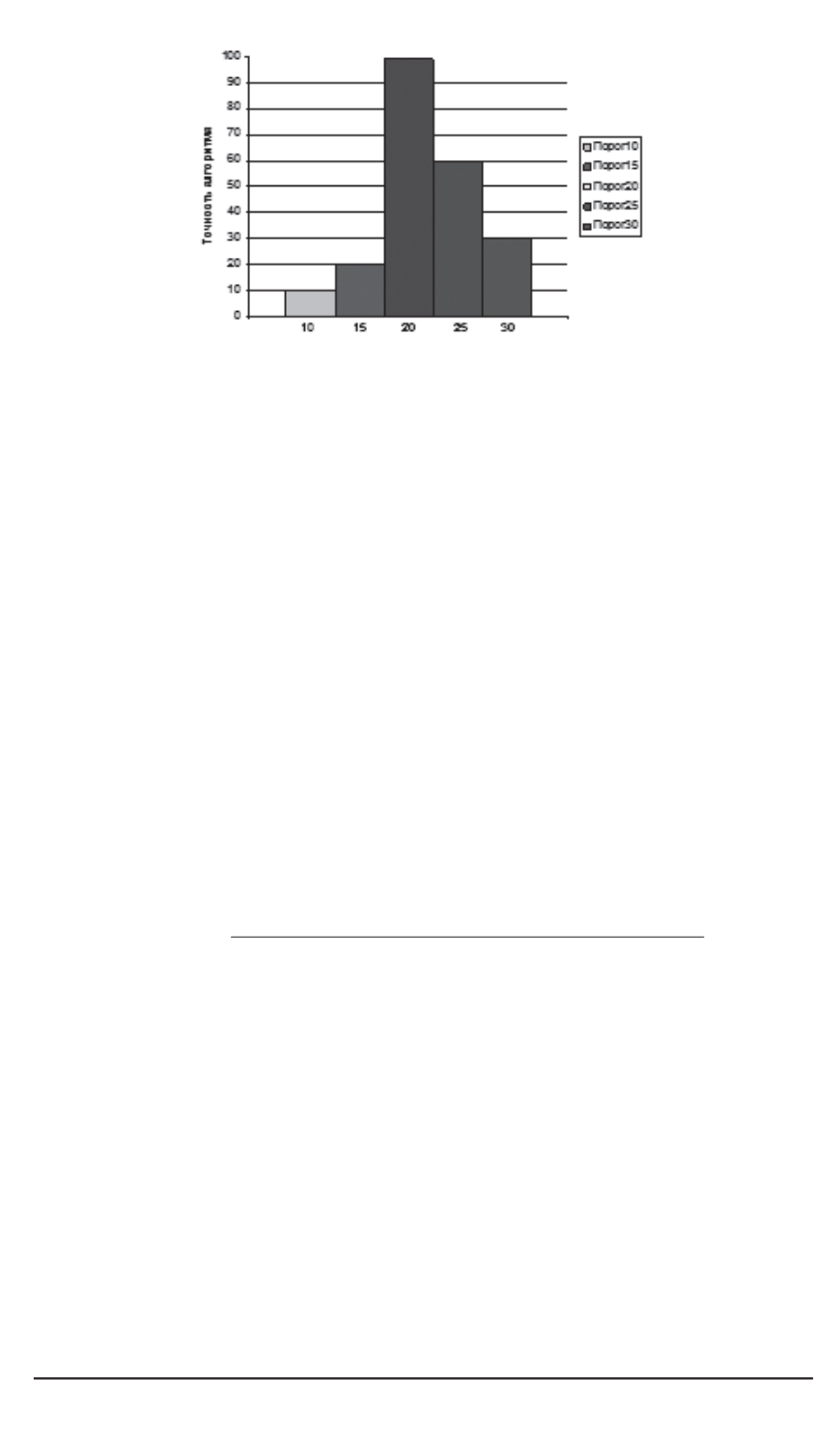
Рис. 12. Выбор порога в алгоритме обнаружения двигающегося объекта
На рис. 12 приведены гистограммы порогов чувствительности для
данного алгоритма. По вертикальной оси расположена точность ал-
горитма в процентах, по горизонтальной — столбцы разных значений
порогов. Из гистограмм видно, что при пороге, равном 20, 99% за-
фиксированных пикселей принадлежит двигающемуся объекту.
Точность распознавания жеста, выполняемого одной рукой одним
человеком, определяли следующем образом. Пользователь выполнял
жесты в нормальных условиях освещения, находясь перед камерой.
Жесты выполнялись одной рукой. Рука могла быть как левой, так и
правой. Распознавали жесты в виде букв
Z, M, P, N, W
и фигур —
окружность, волна, треугольник, квадрат, крест. Во время обучения
каждый жест был повторен 10 раз. Жест выполнялся со средней ско-
ростью (
∼
1
жест/с). Число тестовых жестов равно 50.
Точность распознавания рассчитывалась по формуле
Точность
_
распознавания
=
=
Количество
_
распознанных
_
жестов
Количество
_
тестовых
_
жестов
·
100%
.
Результаты распознавания представлены в табл. 1.
Нахождение точности распознавания жестов одного человека, вы-
полняющего их двумя руками по очереди, проводилось аналогично
предыдущему распознаванию. Жесты выполнялись правой и левой
рукой поочередно. Во время обучения каждый жест был повторен 10
раз левой и правой рукой соответственно. Число тестовых жестов рав-
нялось 100.
Метод расчета точности распознавания был повторен 3 раза, чтобы
для каждого жеста можно было найти лучшую, худшую и среднюю
точности. Результаты для тестовых данных приведены на рис. 13, вер-
тикальная ось — точность распознавания в процентах, горизонтальная
— распознаваемые жесты.
70 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 3


