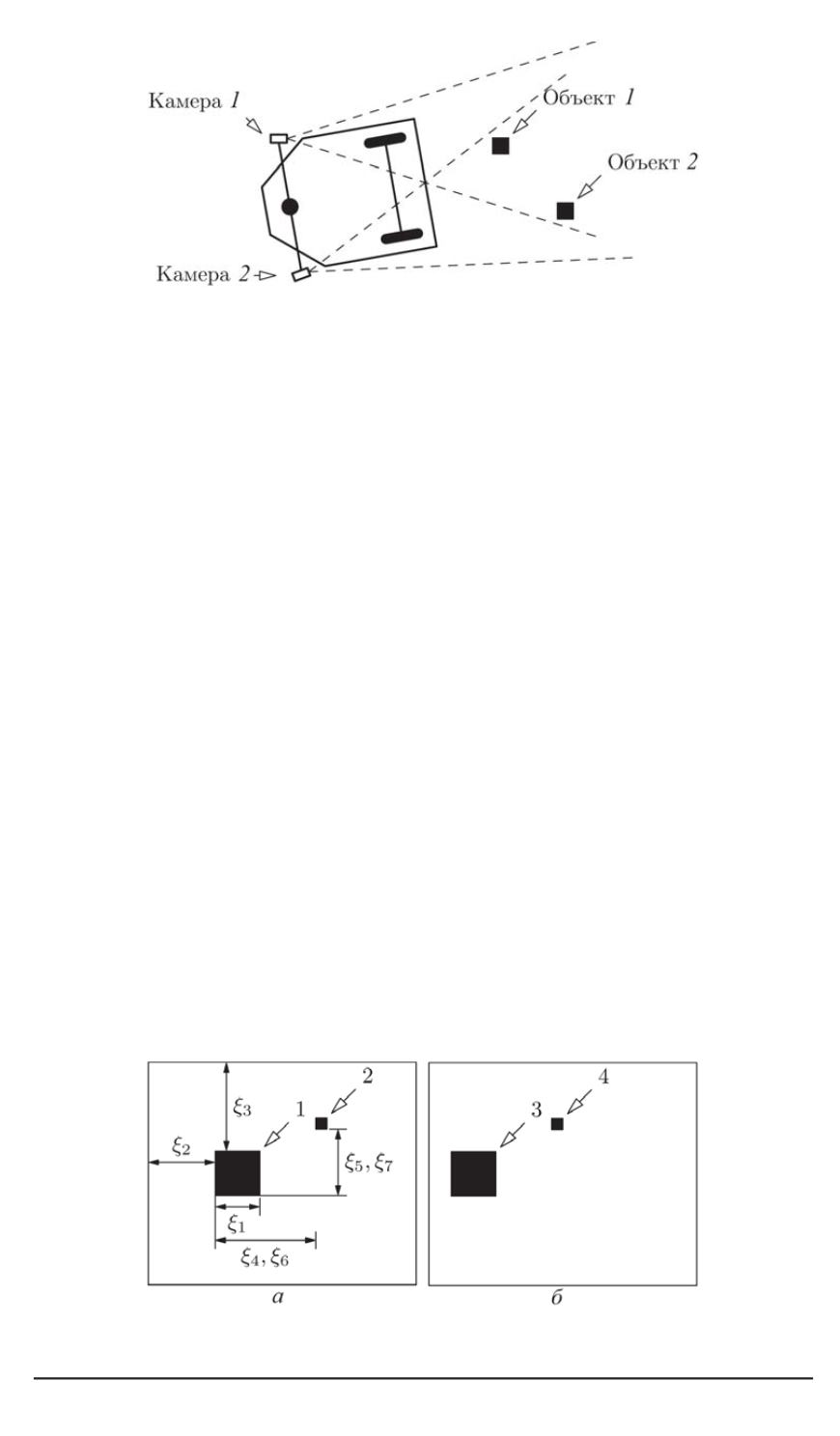
Рис. 8. Мобильный робот и объекты внешней среды
На рис. 8 приведена схема мобильного робота, оснащенного сте-
реосенсором, состоящим из двух идентичных видеокамер, который
может наблюдать объекты внешней среды, расположенные произволь-
но относительно мобильного робота. В задаче сопоставления объектов
на изображениях стереокамеры [5] требуется выделить группу объек-
тов, попадающих в общее поле зрения, и сопоставить их друг с другом
(установить связи тождественности).
Выделим для каждого объекта на изображении общий вектор при-
знаков, который возможно локализовать автоматически с помощью
алгоритмов обработки изображений [5, 6] (рис. 9). Приведем названия
компонентов вектора.
Вектор признаков объекта на изображении:
Масса (площадь) объекта —
ξ
1
;
Расстояние по оси
X
до левого края изображения —
ξ
2
;
Расстояние по оси
Y
до верхнего края изображения —
ξ
3
;
Расстояние до объекта слева по осям
X
и
Y
—
ξ
4
и
ξ
5
;
Расстояние до объекта справа по осям
X
и
Y
—
ξ
6
и
ξ
7
.
Рассмотрим произвольный момент времени
t
, для которого значе-
Рис. 9. Изображения объектов для двух камер стереосенсора:
камеры 1 (
а
) и 2 (
б
)
82 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1


