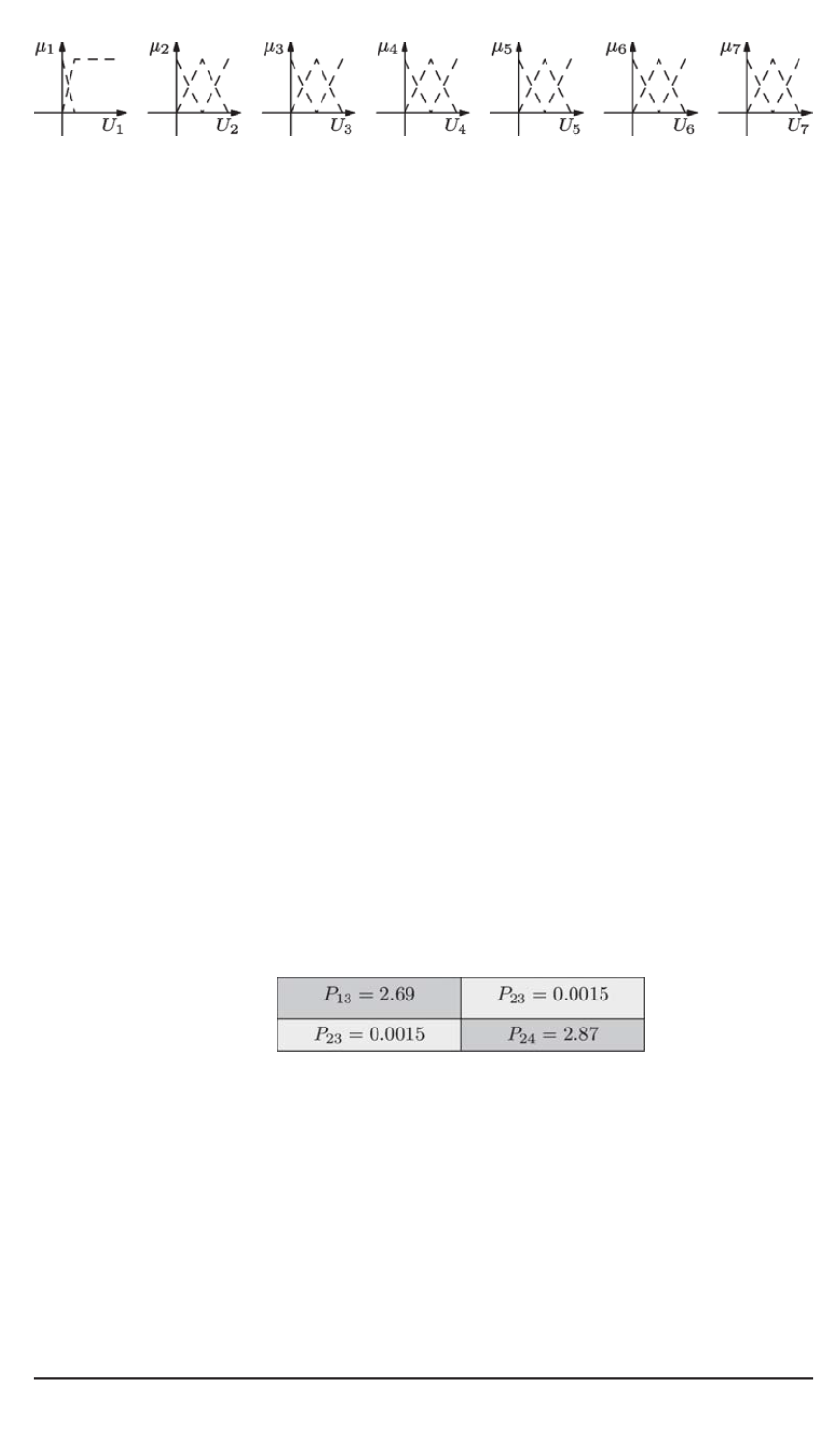
Рис. 10. Общий вектор признаков
ния компонентов вектора признаков каждого объекта на изображении
равны соответственно:
Ξ
1
(
t
) =
{
3
.
33
,
25
,
40
,
0
,
0
,
25
,
15
.
7
}
;
Ξ
2
(
t
) =
{
0
.
15
,
63
,
24
,
25
,
15
.
7
,
0
,
0
}
;
Ξ
3
(
t
) =
{
3
.
33
,
8
.
33
,
40
,
0
,
0
,
21
.
4
,
15
.
7
}
;
Ξ
4
(
t
) =
{
0
.
15
,
45
.
2
,
24
,
21
.
4
,
15
.
7
,
0
,
0
}
.
(15)
Числовые данные (15) были получены при моделировании систе-
мы технического зрения в среде Matlab. На рис. 10 приведен набор
лингвистических переменных, который характеризует общий вектор
признаков объектов, используемый для фаззификации. Количество и
форма нечетких множеств для каждой лингвистической переменной
были получены экспертным путем.
На рис. 11 показан результат фаззификации векторов признаков
(15) по вектору лингвистических переменных (рис. 10) в соответствии
с выражением (3).
За множество эталонных точек сенсорной траектории примем мно-
жество
¯Ψ =
{
ˆΞ
1
(
t
)
,
ˆΞ
2
(
t
)
}
, а за множество тестовых точек — множе-
ство
Ψ =
{
ˆΞ
3
(
t
)
,
ˆΞ
4
(
t
)
}
. Тогда результатом сопоставления будет мно-
жество результирующих векторов
{
ˆΞ
+
13
(
t
)
,
ˆΞ
+
14
(
t
)
,
ˆΞ
+
23
(
t
)
,
ˆΞ
+
24
(
t
)
}
(рис. 12).
Матрица соответствия (10) в таком случае будет иметь следующий
вид:
Максимальные элементы
P
13
и
P
24
будутв данном случае харак-
теризовать совпадение между изображениями объектов 1–3 и 2–4 (см.
рис. 9). Таким образом, связь тождественности между изображениями
объектов установлена, что позволяет провести дальнейшее восстано-
вление трехмерной координаты объектов [5].
Заключение.
Рассмотрен нечетко-ассоциативный метод сравнения
наборов сенсорных данных, результатом которого является критерий
соответствия точек эталонного и тестового наборов. Данный критерий
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1 83


