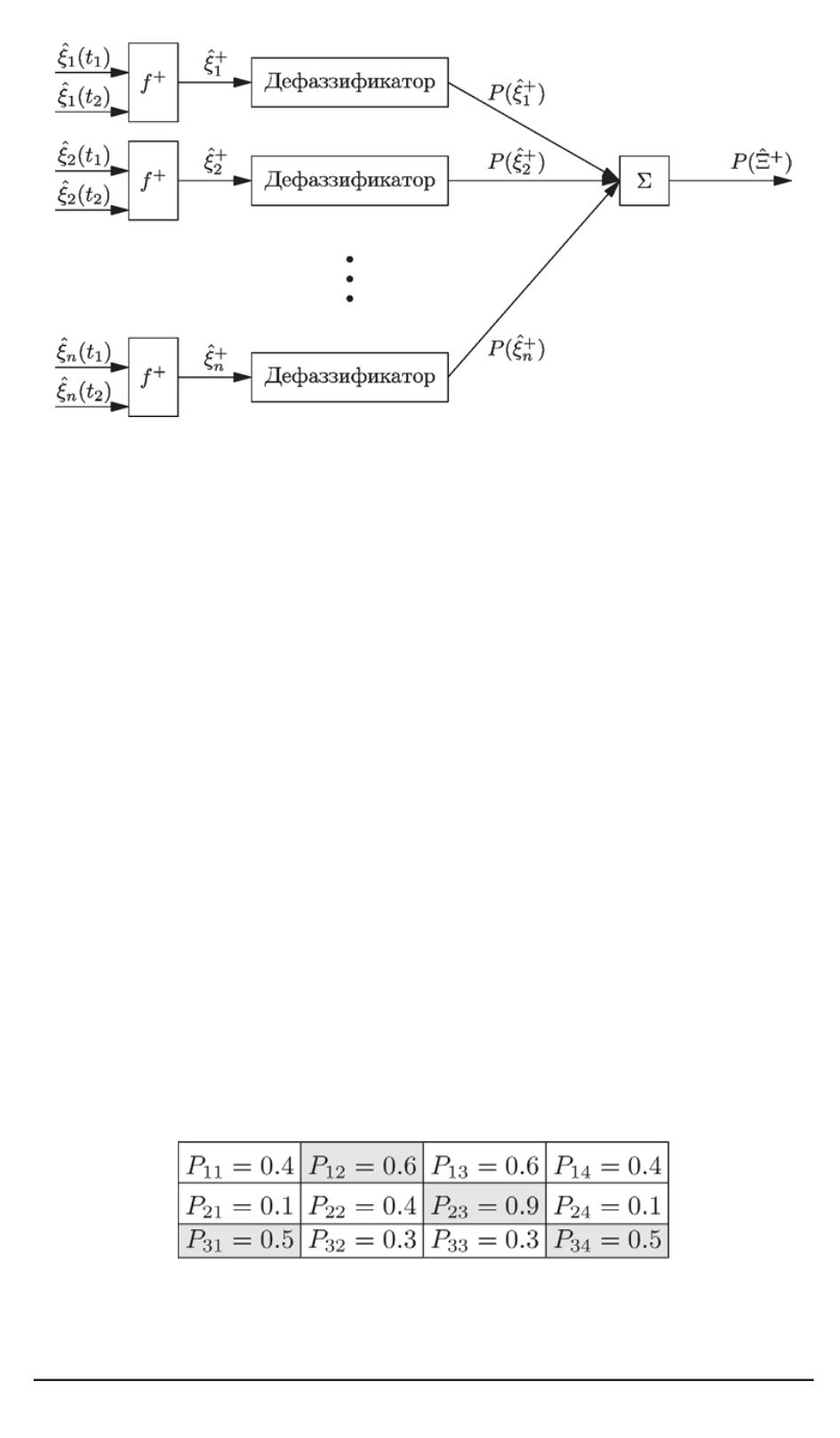
Рис. 6. Схема сопоставления нечетких чисел
Пусть
¯Ψ =
{
¯Ψ
1
,
¯Ψ
2
, . . . ,
¯Ψ
l
}
— множество эталонных точек,
а
Ψ =
{
Ψ
1
,
Ψ
2
, . . . ,
Ψ
k
}
— множество тестовых точек сенсор-
ной траектории робота. Тогда, при сравнении этих двух множеств
будетполучена
матрица соответствия
Π
, составленная из дефаззи-
фицированных значений
P
(
f
+
( ¯Ψ
,
Ψ))
для всех комбинаций нечетких
чисел (10):
Π =
⎛
⎜⎜⎜⎝
P
11
(
f
+
( ¯Ψ
1
,
Ψ
1
))
P
12
(
f
+
( ¯Ψ
1
,
Ψ
2
))
. . . P
1
k
(
f
+
( ¯Ψ
1
,
Ψ
k
))
P
21
(
f
+
( ¯Ψ
2
,
Ψ
1
))
P
22
(
f
+
( ¯Ψ
2
,
Ψ
2
))
. . . P
2
k
(
f
+
( ¯Ψ
2
,
Ψ
k
))
...
...
. . .
...
P
l
1
(
f
+
( ¯Ψ
l
,
Ψ
1
))
P
l
2
(
f
+
( ¯Ψ
l
,
Ψ
2
))
. . . P
lk
(
f
+
( ¯Ψ
l
,
Ψ
k
))
⎞
⎟⎟⎟⎠
;
(10)
M
1
= (max
i
=1
...l
Π
i
1
,
max
i
=1
...l
Π
i
2
, . . . ,
max
i
=1
...l
Π
ik
)
.
(11)
Вектор
M
1
максимальных элементов (11) будет характеризовать
соответствие точек тестового набора точкам из эталонного набора.
Далее приведена итоговая матрица соответствия для двух наборов то-
чек сенсорной траектории мобильного робота, где присутствуют мак-
симальные элементы для каждого столбца матрицы соответствия, ха-
рактеризующие наличие и степень соответствия точки из тестового
набора точке из эталонного набора точек сенсорной траектории:
Для уменьшения вычислительных затрат и оптимизации алгоритма
вычисления интегралов функций принадлежности заменим функцию
80 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1


