Неполнота и недостоверность информации об объектах внешней
среды, связанная с несовершенством измерительной системы, являет-
ся дополнительным препятствием при управлении мобильным робо-
том в автономном режиме. В настоящее время широко применяются
методы управления, основанные на теории нечетких множеств [1], по-
зволяющие контролировать мобильный робот в условиях неполноты
информации.
В настоящей работе предложен оригинальный нечетко-ассоциатив-
ный метод обработки результатов измерений сенсоров мобильного ро-
бота, полученных в процессе движения по траектории. Метод позво-
ляет определить соответствие между тестовым и эталонным наборами
данных. В качестве примера приведено распознавание объектов, изо-
бражения которых получены стереокамерой мобильного робота, для
определения их трехмерных координат.
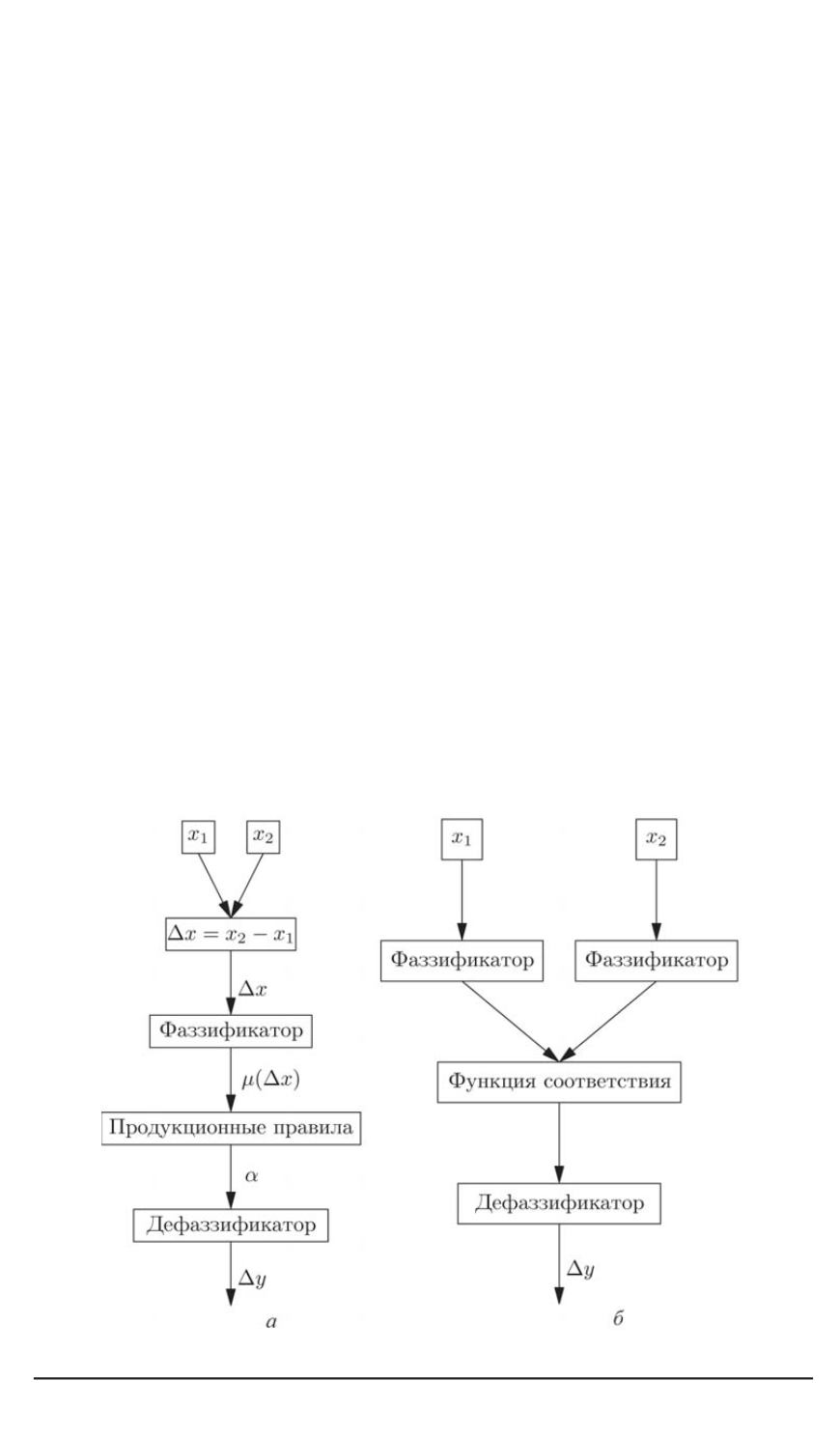
Структура нечетко–ассоциативного контроллера.
Как правило,
фаззификация входных данных предполагаетих предобработку —
формирование нечетких множеств с последующим объединением в
лингвистическую переменную. В классическом нечетком контроллере
[2] продукционные правила, определенные разработчиком системы,
преобразуютвходную лингвистическую переменную в выходную
(рис. 1,
а
). При этом, при сравнении двух четких величин пользуются,
как правило, их приращением, из которого формируют входную лин-
гвистическую переменную [3]. Недостаток такого подхода заключа-
ется в том, что для получения приращения используется одномерная
Рис. 1. Нечеткий контроллер:
а
— классический;
б
— нечетко-ассоциативный
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1 75


