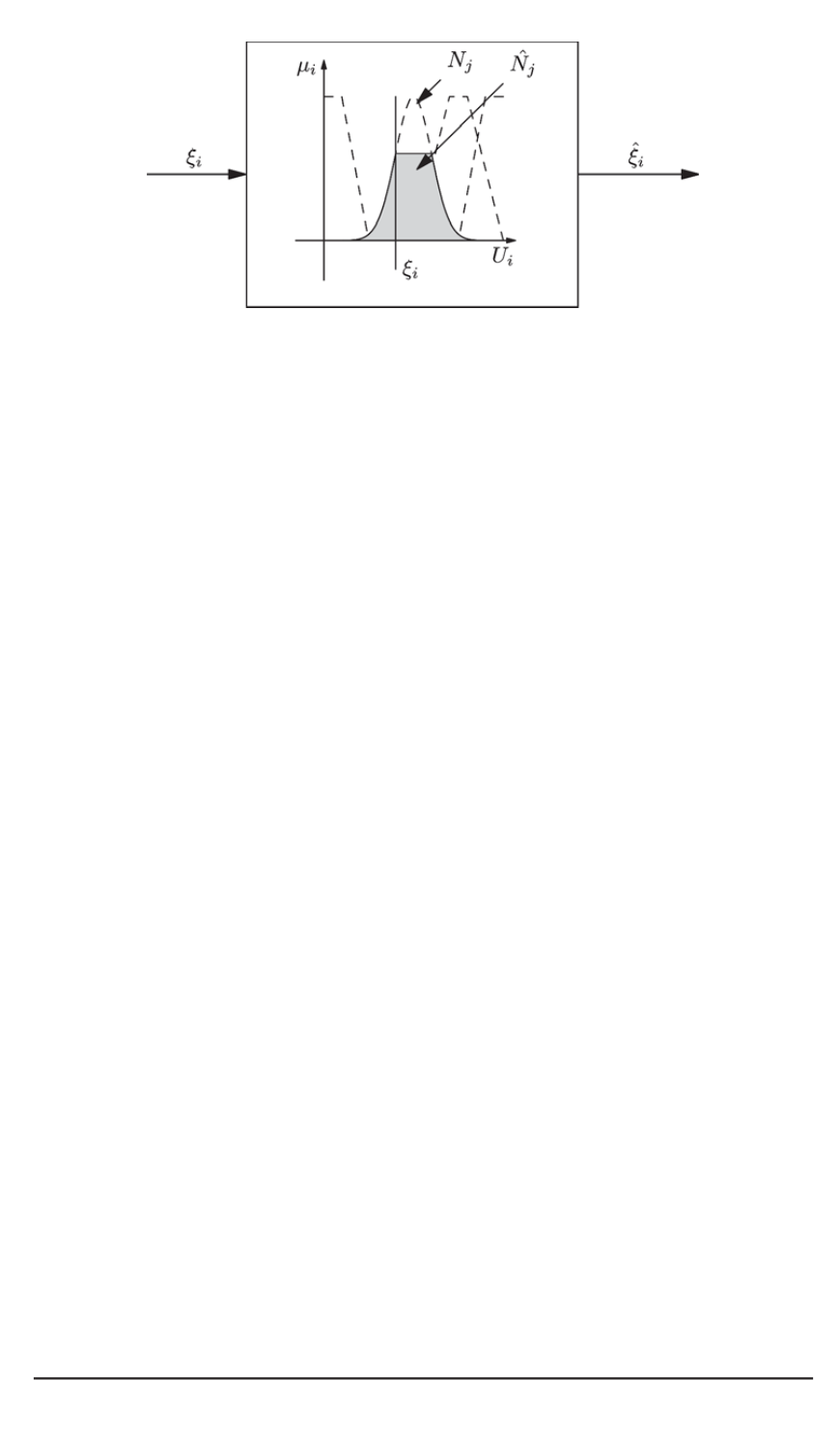
Рис. 3. Фаззификация измерений сенсоров
В процессе движения мобильного робота по траектории произво-
дится фаззификация измерений сенсоров (рис. 3) в следующей после-
довательности:
1. Четкое значение
ξ
i
измеренной сенсорной величины поступает
на вход фаззификатора;
2. В соответствии с нечеткими множествами
N
j
из множества (2),
формирующими каждую лингвистическую переменную, опре-
деляются значения функций принадлежности
μ
j
в т очке
ξ
i
;
3. Из пересечения
N
j
∩
μ
j
(
α
-срез) [2] находится новое нечеткое
множество
ˆ
N
j
;
4. Из всех множеств
ˆ
N
j
выбирается максимальное.
Операция фаззификации можетбыть записана в общем виде:
ˆ
ξ
i
= max
j
=1
...m
(
N
j
∩
μ
j
(
ξ
i
))
.
(3)
В результате операции фаззификации (3) получаем нечеткое мно-
жество
ˆ
ξ
i
, которое является нечетким представлением измеренной
сенсорной величины
ξ
i
. Распространив операцию фаззификации
на весь вектор параметров
Ξ
, получим его нечеткое представление
ˆΞ = ( ˆ
ξ
1
,
ˆ
ξ
2
, . . . ,
ˆ
ξ
N
)
, которое назовем
нечетким вектором измерений
.
Пусть момент времени
t
1
соответствует моменту формирования
эталонного набора точек сенсорной траектории. Как было отмечено
ранее, при этом возможны два варианта: эталонное множество форми-
руется в процессе движения мобильного робота; эталонное множество
точек задается априорно, перед стартом. Далее будем рассматривать
первый вариант, подразумевая, что все выводы справедливы и в дру-
гом случае.
Обозначим
t
2
— момент времени, соответствующий формированию
тестового набора. Тогда для определения соответствия между сенсор-
ными портретами двух точек траектории требуется сравнить нечеткий
вектор
ˆΞ(
t
1
)
с нечетким вектором
ˆΞ(
t
2
)
:
ˆΞ(
t
1
) =
{
ˆ
ξ
1
(
t
1
)
,
ˆ
ξ
2
(
t
1
)
, . . . ,
ˆ
ξ
n
(
t
1
)
}
;
(4)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1 77


