ˆΞ(
t
2
) =
{
ˆ
ξ
1
(
t
2
)
,
ˆ
ξ
2
(
t
2
)
, . . . ,
ˆ
ξ
n
(
t
2
)
}
.
(5)
Сопоставление сенсорных образов сводится к сопоставлению их
нечетких описаний. При этом необходимо провести сравнение каждо-
го элемента множества (4) с соответствующим элементом из множе-
ства (5).
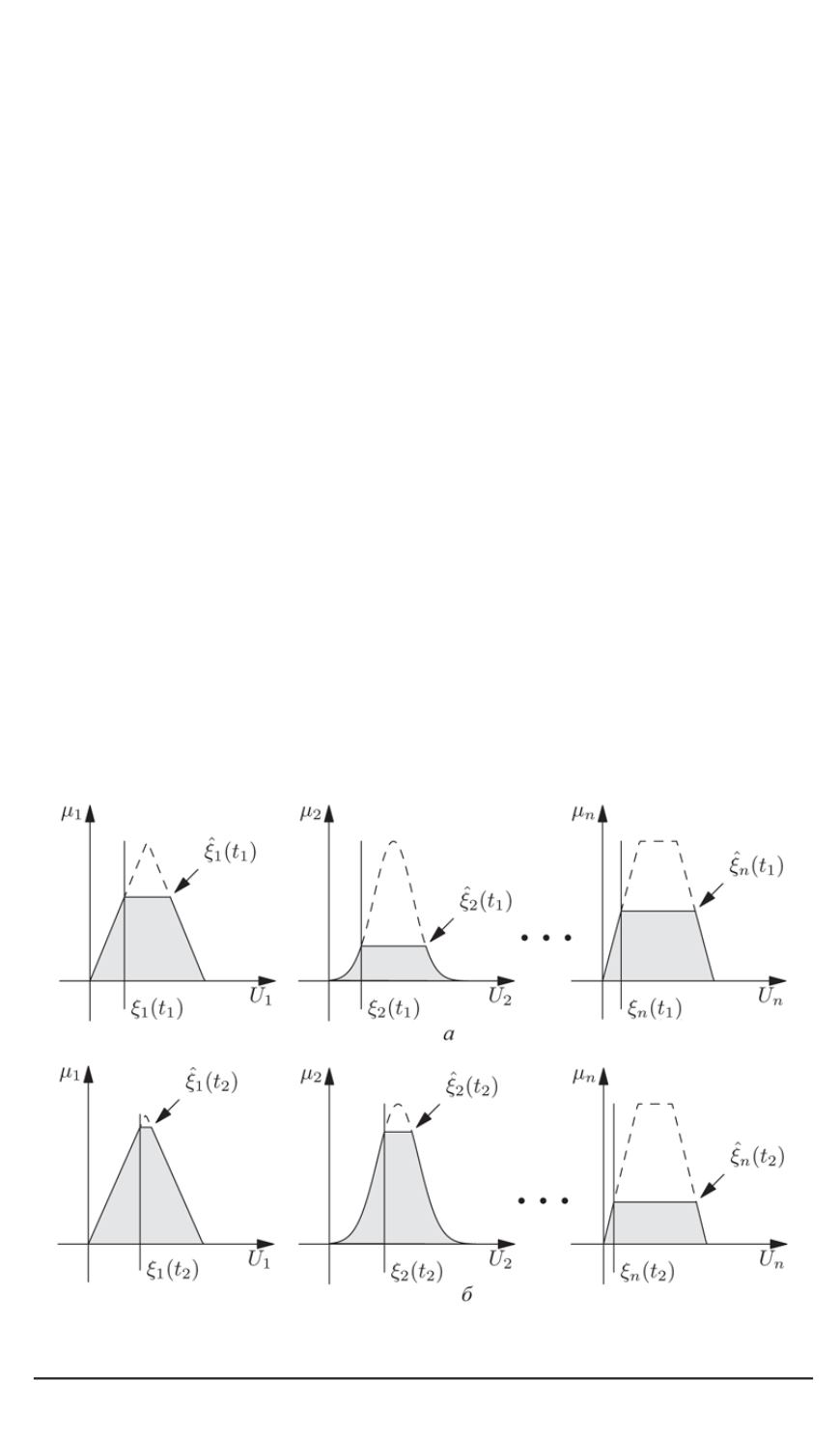
На рис. 4 приведены два нечетких вектора, соответствующие сопо-
ставляемым точкам траектории. Каждый нечеткий вектор состоит из
n
компонетов, соответствующих измерениям датчиков мобильного ро-
бота. На рис. 4 также показана операция фаззификации, проведенная
для каждого компонента. Таким образом, процедура сопоставления
компонентов сенсорных траекторий сводится к попарному сравнению
многомерных векторов нечетких чисел.
Сравнение нечетких векторов ассоциативным методом.
Для
сравнения нечетких чисел предлагаем операцию
нечеткого равенства
:
f
+
(
μ
i
( ˆ
ξ
i
(
t
1
))
, μ
i
( ˆ
ξ
i
(
t
2
))) =
⎧⎨
⎩
1
,
если
μ
i
( ˆ
ξ
i
(
t
1
)) =
μ
i
( ˆ
ξ
i
(
t
2
));
0
,
если
μ
i
( ˆ
ξ
i
(
t
1
)) =
μ
i
( ˆ
ξ
i
(
t
2
))
.
(6)
Отсюда следует, что результатом сравнения двух нечетких векторов
является нечеткий вектор
ˆΞ
+
, функции принадлежности каждого эле-
мента которого будут принимать максимальное значение, если функ-
ции принадлежности сравниваемых элементов равны, и минимальное
Рис. 4. Нечеткие векторы компонентов сенсорной траектории:
а
и
б
— первая и вторая точки траектории
78 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1


