Рис. 7. Результат операции
f
−
(
·
)
(6) на функцию
нечеткого неравенства
:
f
−
(
μ
i
( ˆ
ξ
i
(
t
1
))
, μ
i
( ˆ
ξ
i
(
t
2
))) =
⎧⎨
⎩
1
,
если
μ
i
( ˆ
ξ
i
(
t
1
)) =
μ
i
( ˆ
ξ
i
(
t
2
));
0
,
если
μ
i
( ˆ
ξ
i
(
t
1
)) =
μ
i
( ˆ
ξ
i
(
t
2
))
.
(12)
Функции (6) и (12) связаны между собой равенством
f
−
(
μ
i
( ˆ
ξ
i
(
t
1
))
, μ
i
( ˆ
ξ
i
(
t
2
))) = 1
−
f
+
(
μ
i
( ˆ
ξ
i
(
t
1
))
, μ
i
( ˆ
ξ
i
(
t
2
)))
.
(13)
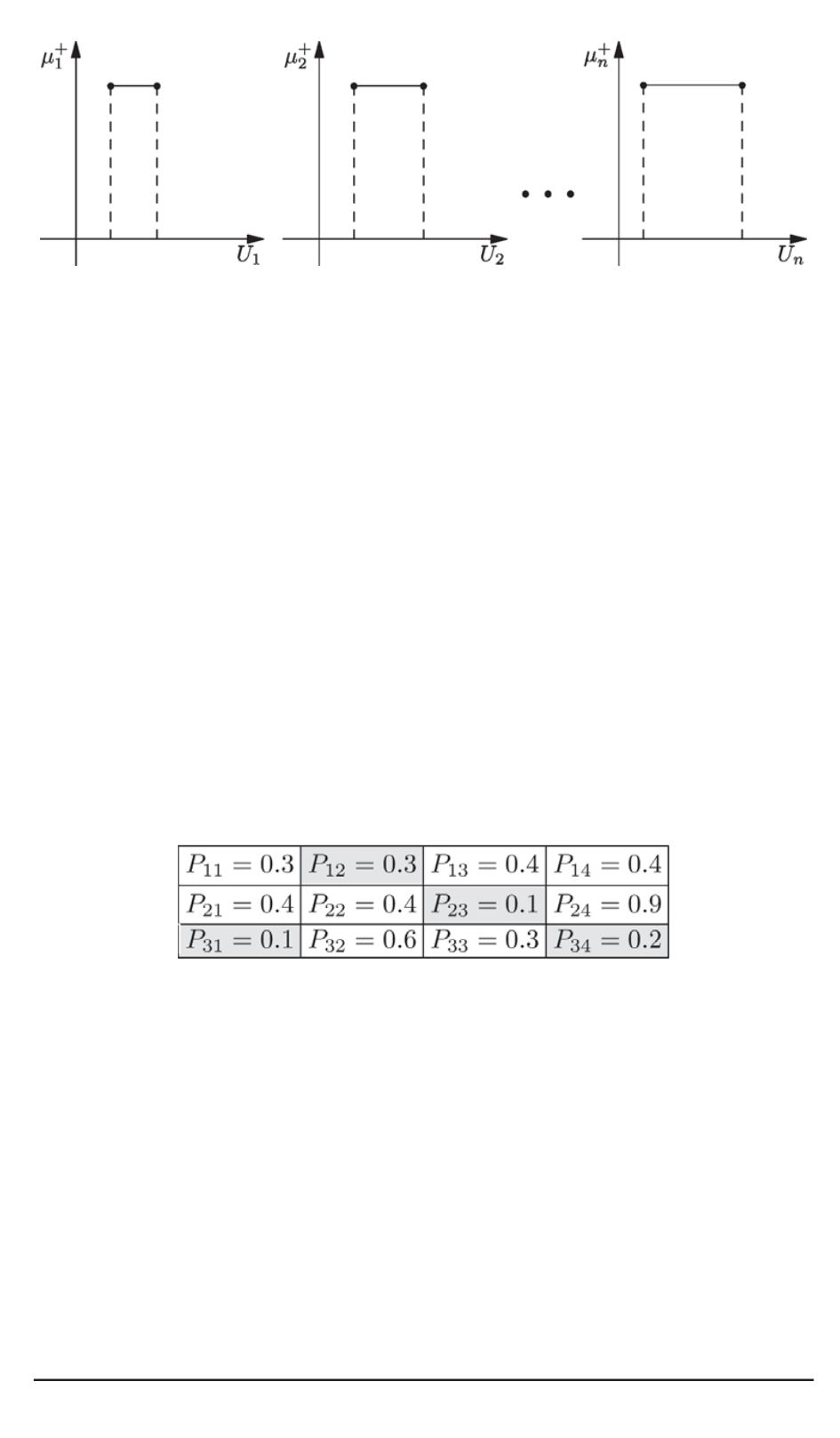
Из рис. 7 виден результат сравнения нечетких чисел (см. рис. 4) с
функцией (12).
При составлении матрицы соответствия (10) в данном случае сле-
дуетискать вектор
M
2
минимальных элементов, характеризующих со-
впадение точек траектории:
M
2
= ( min
i
=1
...l
Π
i
1
,
min
i
=1
...l
Π
i
2
, . . . ,
min
i
=1
...l
Π
ik
);
(14)
далее приведена матрица соответствия для операции
f
−
(
·
)
:
Задача классификации объектов внешней среды.
Рассмотрим
нечетко-ассоциативный метод сопоставления точек сенсорной траек-
тории на примере распознавания объектов внешней среды во время
движения мобильного робота.
Одним из этапов в алгоритмах навигации для управления мо-
бильным роботом, оснащенным стереокамерой, является сопоставле-
ние двумерных координатобъектов, локализованных на изображениях
каждой из камер стереосенсора, для итогового восстановления трех-
мерной координаты [5, 6]. При этом каждый из объектов классифи-
цируется по ряду признаков, по которым удобно сопоставить объекты
друг c другом.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 1 81


