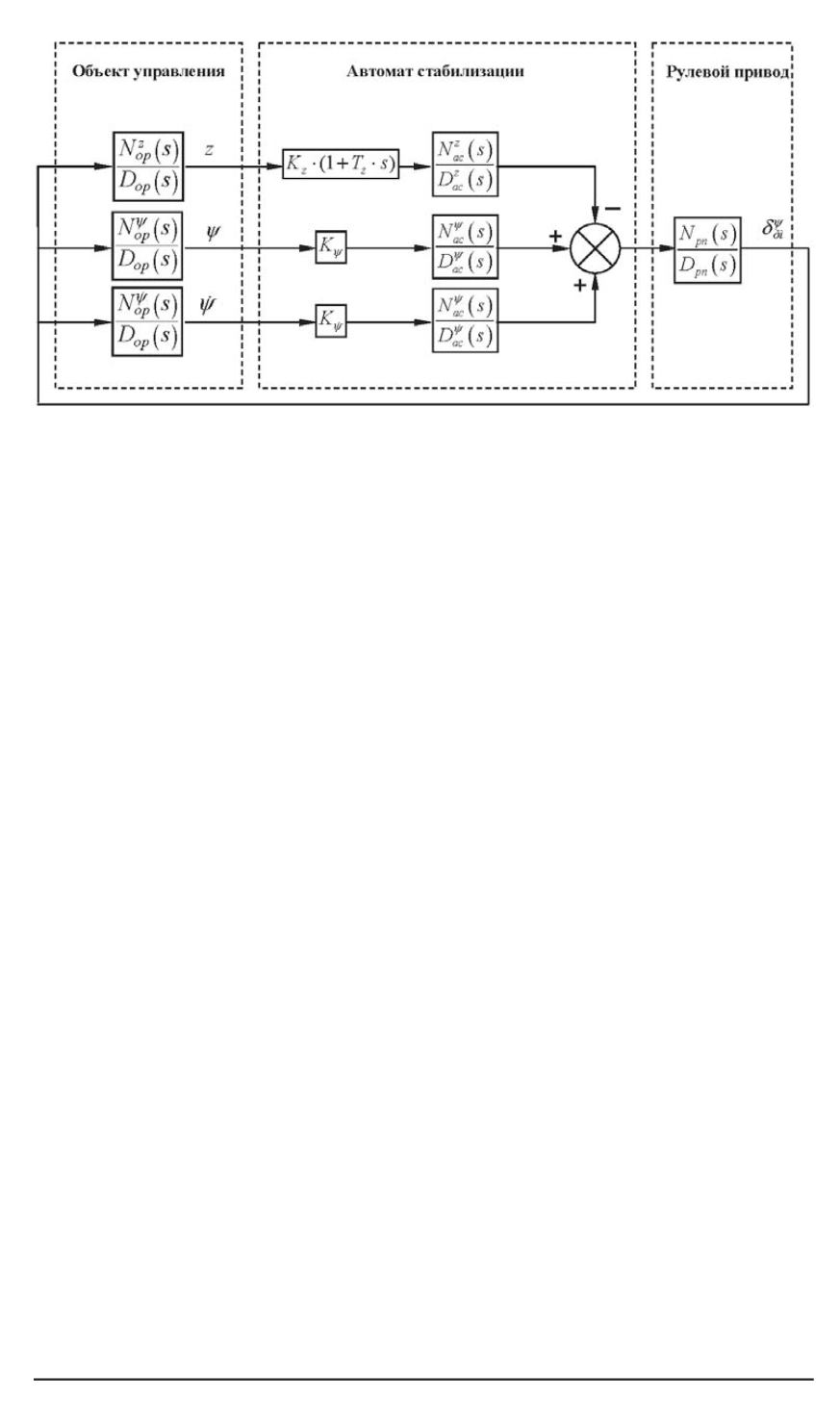
Рис. 3. Структурная схема изделия для частотного анализа
тизировать процесс построения областей устойчивости на плоскости
коэффициентов усиления практически для любой модели автомата ста-
билизации.
Модель рулевого привода задается в виде аппроксимирующей пе-
редаточной функции или в виде экспериментальной частотной харак-
теристики. В общем случае можно задавать набор линейных характе-
ристик, соответствующих различным уровням входного сигнала, что
позволяет оценивать возможные амплитуды реализующихся в системе
автоколебательных циклов без проведения моделирования движения,
а также определить факторы, влияющие на амплитуду этих циклов.
Пример связи модели объекта с моделями автомата стабилизации и
рулевого привода показан на рис. 3. Из рисунка видно, что суммарная
передаточная функция разомкнутой системы “объект регулирования +
автомат стабилизации + рулевой привод” рассчитывается по формуле
W
Σ
(
s
) =
K
ψ
W
ψ
op
(
s
)
W
ψ
ac
(
s
) +
K
˙
ψ
W
˙
ψ
op
(
s
)
W
˙
ψ
ac
(
s
)
−
−
K
z
(1 +
T
˙
z
s
)
W
z
ac
(
s
)
W
pп
(
s
)
.
(7)
Полученная передаточная функция позволяет выполнять построе-
ние различных частотных характеристик изделия и рассчитывать кор-
ни характеристического уравнения замкнутой системы.
Окно выбора частотных характеристик представлено на рис. 4.
По рассчитанным передаточным функциям можно построить раз-
личные частотные характеристики как объекта управления (вход —
эквивалентный угол поворота рулевых камер, выходы — координата
центра масс относительно номинальной траектории, линейная ско-
рость, угловое рассогласование и угловая скорость), так и комбинации
объекта управления с математическими моделями рулевых приводов
и автомата стабилизации.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 1 99


