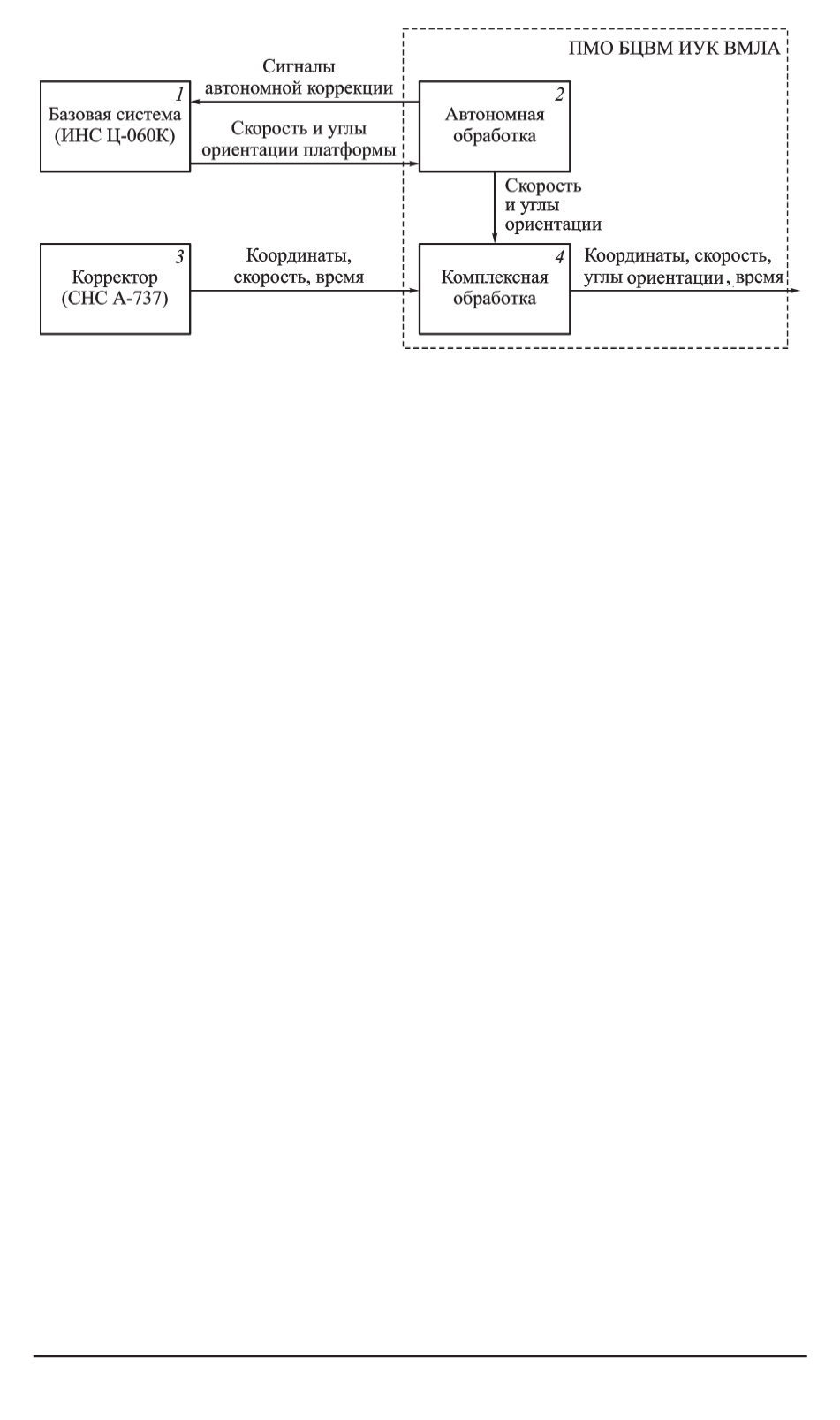
Рис. 1. Схемакомплексирования ИНС и СНС
собой серийное изделие, не подлежащее доработкам, то наиболее пра-
вильным представляется использование разомкнутой схемы (рис. 1),
требующей минимальной доработки комплекса. На схеме приведены
элементы (
1, 2
), входящие в состав комплексов строевых ВМЛА до
модернизации, и новые элементы — приемник спутниковой навига-
ционной системы (СНС) (
3
) и пакет соответствующихалгоритмов
КОИ (
4
).
Основу алгоритмов КОИ составляет математическая модель по-
грешностей ИНС. В рабочем режиме гиростабилизированная плат-
форма ИНС, с которой связан ортогональный трехгранник
О
ξ
пл
η
пл
ζ
пл
,
моделирует движение опорного трехгранника
О
ξηζ
, у которого ось
О
ζ
является местной вертикалью. Угловое рассогласование этихтрехгран-
ников однозначно описывается вектором малого конечного поворота
Φ
пл
от
О
ξηζ
к
О
ξ
пл
η
пл
ζ
пл
, дифференциальное уравнение для которого
в линейном приближении имеет вид [1, 2]
˙
Φ
пл
=
−
ω
×
Φ
пл
+
ω
пл
−
ω,
где
ω
и
ω
пл
— абсолютные угловые скорости указанныхтрехгранни-
ков, причем скорость
ω
пл
состоит из рассчитываемой с некоторой по-
грешностью скоростью опорного трехгранника и собственного дрейфа
гироплатформы (ГСП).
Основные дифференциальные уравнения модели ошибок платфор-
менной ИНС могут быть записаны в следующем виде [1, 2]:
Δ ˙
V
ξ
= Φ
пл
ζ
a
η
−
Φ
пл
η
a
ζ
+
δa
ξ
−
g
η
Δ
χ
−
Δ
V
ξ
K
ξ
V
ζ
+
ω
ζ
Δ
V
η
;
Δ ˙
V
η
=
−
Φ
пл
ζ
a
ξ
+ Φ
пл
ξ
a
ζ
+
δa
η
+
g
ξ
Δ
χ
−
Δ
V
η
K
η
V
ζ
−
ω
ζ
Δ
V
ξ
;
˙Φ
пл
ξ
= Φ
пл
η
ω
ζ
−
Φ
пл
ζ
ω
η
−
Δ
V
η
K
η
+
δω
ξ
;
˙Φ
пл
η
= Φ
пл
ζ
ω
ξ
−
Φ
пл
ξ
ω
ζ
+ Δ
V
ξ
K
ξ
+
δω
η
;
˙Φ
пл
ξ
= Φ
пл
ξ
ω
η
−
Φ
пл
η
ω
ξ
+
δω
ζ
,
56 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 3


