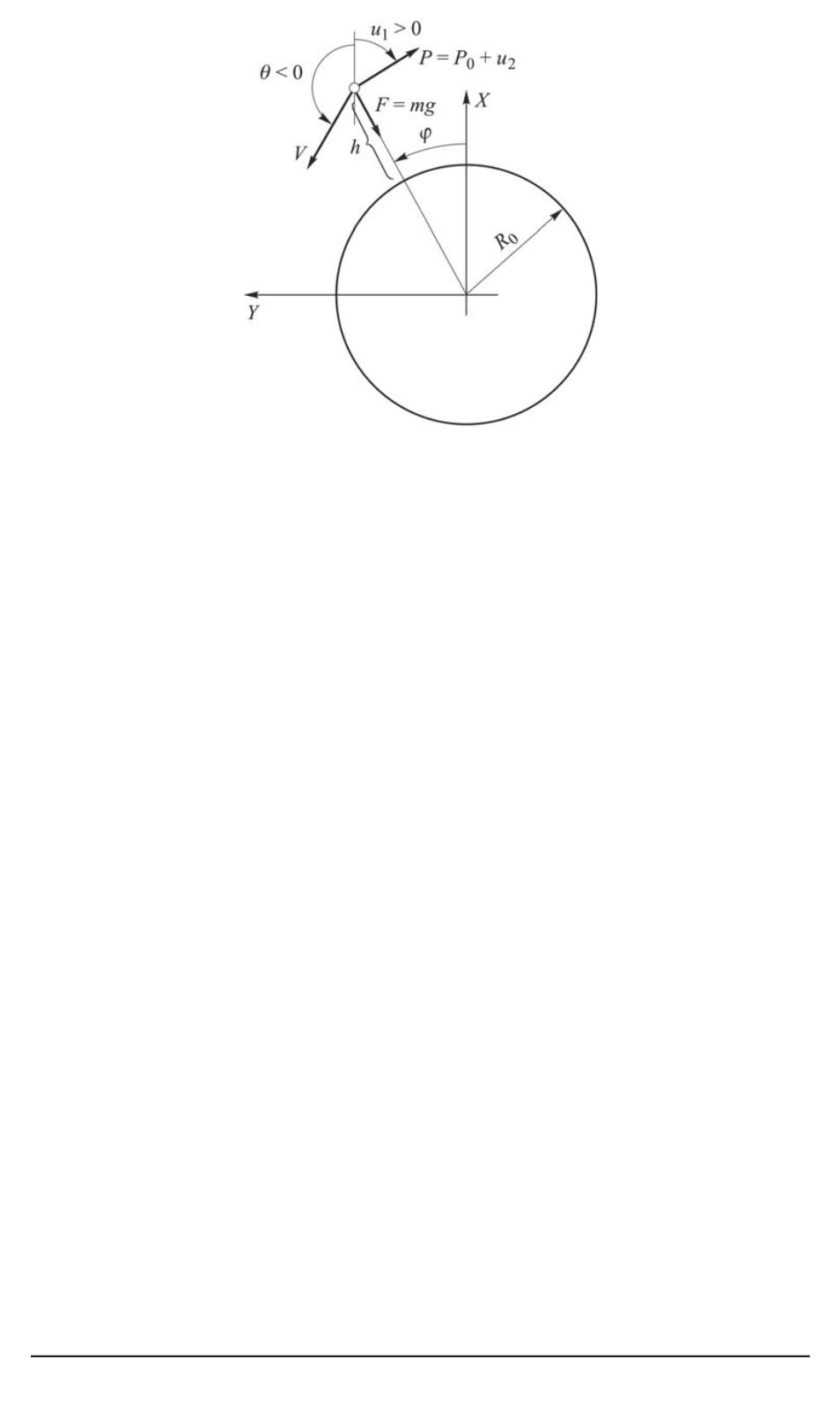
Рис. 1. Схема этапа посадки космического аппарата на Луну
Космический аппарат из начального состояния, обозначенного на
рис. 1 кружком, должен за счет тяги
P
тормозного двигателя обеспе-
чить гашение скорости и опуститься с заданной скоростью на задан-
ную высоту.
Управление космическим аппаратом осуществляется путем изме-
нения направлением тяги двигателя и ее значения.
Для модели известны следующие начальные значения:
V
(0) =
V
0
, θ
(0)
∈
θ
−
0
, θ
+
0
, h
(0)
∈
h
−
0
, h
+
0
,
ϕ
(0) =
ϕ
0
, m
(0) =
m
0
,
(7)
где
θ
−
0
и
θ
+
0
— наименьшее и наибольшее начальные значения угла
наклона траектории;
h
−
0
и
h
+
0
— наименьшее и наибольшее значения
начальной высоты.
Заданы терминальные условия
V
(
t
f
)
∈
V
−
f
, V
+
f
, h
(
t
f
)
∈
h
−
f
, h
+
f
;
(8)
t
f
=
t,
если
V
(
t
)
∈
V
−
f
, V
+
f
∧
h
(
t
)
∈
h
−
f
, h
+
f
;
t
+
,
иначе
,
;
(9)
где
V
−
f
и
V
+
f
— наименьшее и наибольшие терминальные значения
модуля скорости;
h
−
f
и
h
+
f
— наименьшее и наибольшее терминальные
значения высоты полета;
t
+
— максимальное время полета.
Значения компонент управления (изменения тяги и угла направле-
ния тяги) ограничены
u
1
∈
u
−
1
, u
+
1
,
u
2
∈
u
−
2
, u
+
2
,
(10)
где
u
−
1
и
u
+
1
— наименьший и наибольший углы направления тяги;
u
−
2
и
u
+
2
— наименьшее и наибольшее значение приращения тяги.
18 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 4


