Ψ =
⎡
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
0 0 0 0 0 0 1 23 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 9 0 0 4 0 0
0 0 0 0 0 0 0 1 0 0 0 0 5 0 0 0
0 0 0 0 0 0 0 0 1 0 0 11 0 0 0 0
0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 1 0 0 18 0 0 0
0 0 0 0 0 0 0 1 0 0 1 0 0 0 9 0
0 0 0 0 0 0 0 0 1 0 0 3 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0 0 0 5 0
0 0 0 0 0 0 0 0 0 0 0 0 6 1 0 0
0 0 0 0 0 0 0 0 0 0 0 1 6 18 0 3
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 6
0 0 0 0 0 0 0 0 0 0 0 0 0 0 8 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 15
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
⎤
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
.
На рис. 2–9 приведены результаты моделирования спуска космиче-
ского аппарата на Луну с синтезированной системой управления для
начальных условий
h
(0) =
h
0
= 18
,
148
км.,
θ
(0) =
θ
0
=
−
1
,
6
рад.
В табл. 1 приведены результаты исследования чувствительности
системы управления к изменению начальных условий. Как следует
из таблицы, при всех допустимых изменениях начальных условий си-
стема управления обеспечивает достижение терминальной области с
высокой точностью.
Для полученного решения были проведены исследования влияния
неточности измерений на выполнение терминальных условий. Пред-
полагалось, что основные компоненты состояния объекта управления
— угол наклона траектории
θ
и высота
h
измеряются с некоторой
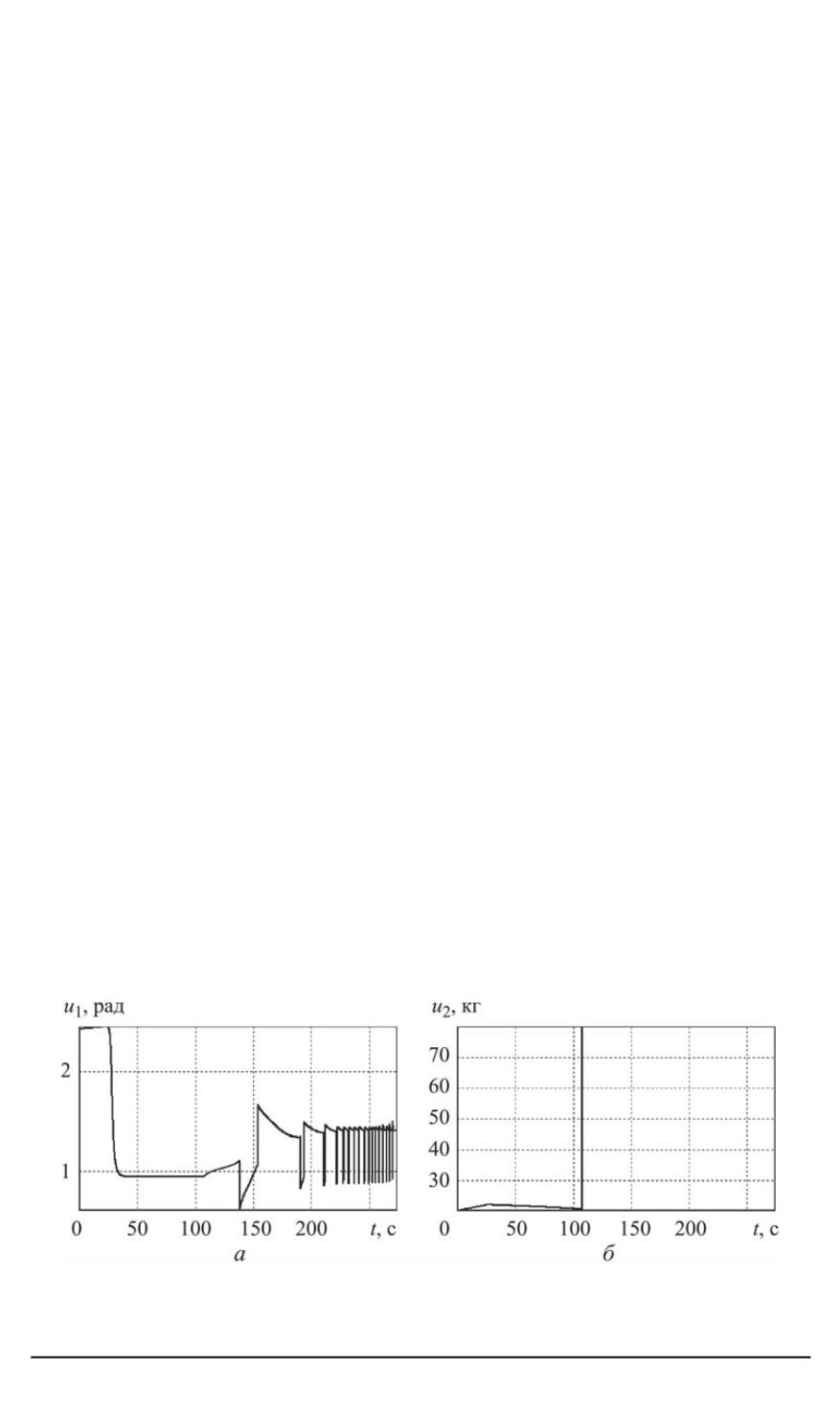
Рис. 2. Компоненты управления
u
1
(
t
)
(
а
) и
u
2
(
б
) в зависимости от времени
спуска КА
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 4 23


