генетического программирования необходимо иметь мощные компью-
теры, обеспечивающие просмотр нескольких миллионов вариантов.
Улучшение метода генетического программирования для решения
задачи синтеза управления привело к созданию метода сетевого опе-
ратора [10–24]. В отличие от метода генетического программирова-
ния в методе сетевого оператора функция отыскивается в виде це-
лочисленной матрицы. Поиск оптимального решения осуществляется
с помощью вариационного генетического алгоритма, что позволяет
проектировщику задавать направления поиска в виде базисного реше-
ния. Данное обстоятельство позволяет учитывать опыт разработчика
и существенно уменьшить время вычислений.
Постановка задачи.
Рассмотрим задачу синтеза управления кос-
мическим аппаратом на этапе спуска с окололунной орбиты в задан-
ную область вблизи поверхности Луны.
Модель объекта управления описывается следующей системой
дифференциальных уравнений:
dV
dt
=
W
cos (
u
1
−
θ
)
−
g
cos
θ
;
(1)
dθ
dt
=
1
V
(
W
sin (
u
1
−
θ
) +
g
sin
θ
) ;
(2)
dh
dt
=
V
cos
θ
;
(3)
dϕ
dt
=
V
R
sin
θ
;
(4)
dm
dt
=
−
P
0
+
u
2
P
ud
,
(5)
где
V
— модуль скорости движения космического аппарата;
θ
—
угол наклона траектории относительно гравитационной вертикали;
W
— ускорение от тяги двигателя;
P
0
— номинальное значение
тяги двигателя,
P
0
= 440
кг;
m
— масса космического аппарата;
g
0
— модуль ускорения свободного падения на поверхности Луны,
g
0
= 1
,
623
м/с
2
,
˜
g
= 9
,
80665
м/с
2
;
R
0
— средний радиус поверхности
Луны,
R
0
= 1738
,
4
км;
R
— модуль радиус-вектора от центра Луны до
космического аппарата;
h
— высота полета космического аппарата;
ϕ
— угол дальности вдоль поверхности Луны;
P
ud
— удельный импульс
двигателя,
P
ud
= 319
с;
W
=
˜
g
(
P
0
+
u
2
)
m
;
g
=
g
0
R
0
R
0
+
h
2
;
R
=
R
0
+
h.
(6)
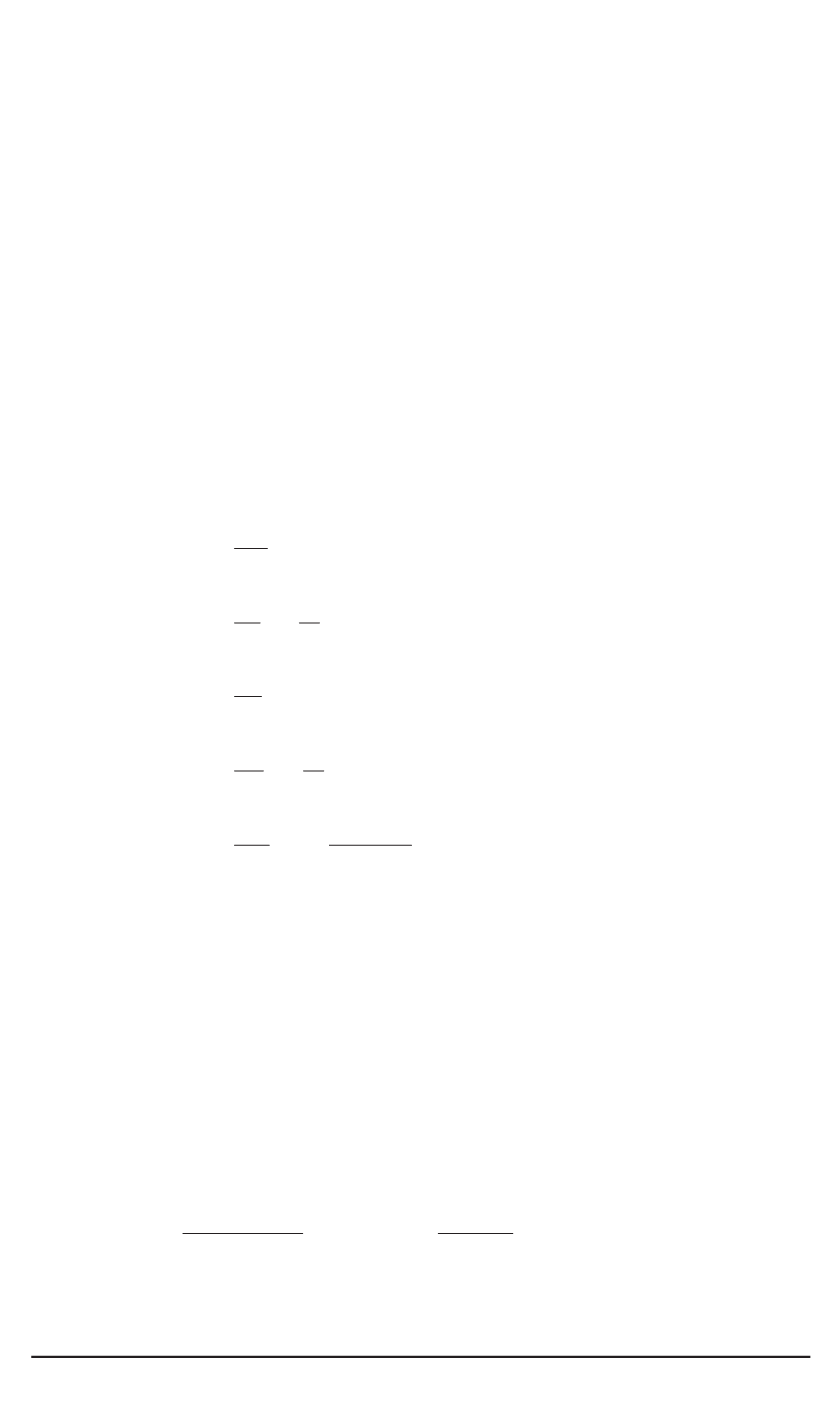
Схема спуска космического аппарата на поверхность Луны приве-
дена на рис. 1.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 4 17


