














 14 / 19
14 / 19

Е.М. Воронов, Ю.Г. Оболенский, Д.И. Чеглаков
142
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 3
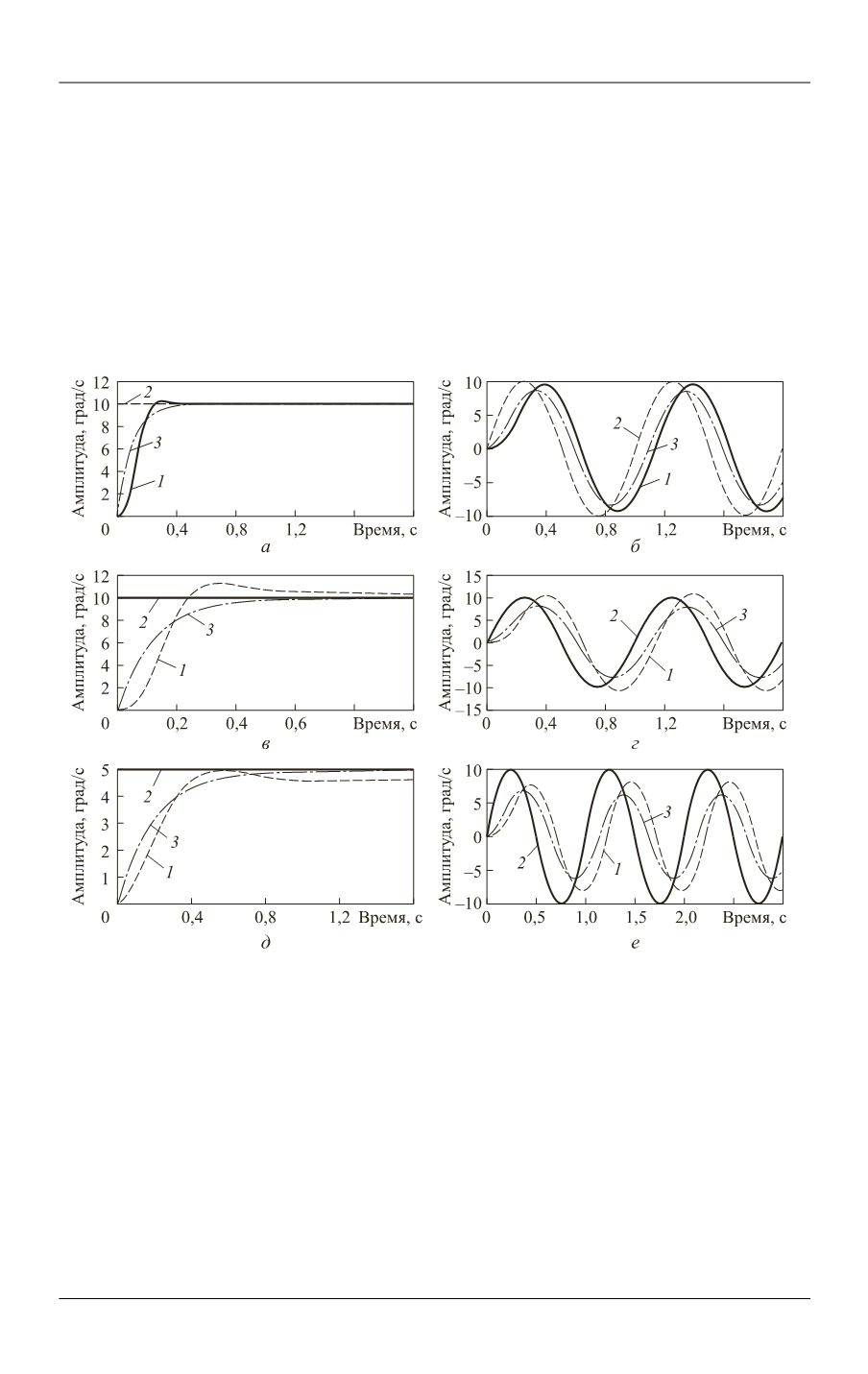
сигнале (рис. 6,
а
) алгоритм обеспечивает перерегулирование менее 1 %, а время
переходных процессов
п.п
0, 22
t
=
с. При заданном синусоидальном воздействии
алгоритм обеспечивает минимальное рассогласование угловой скорости крена с
выходным сигналом модели
М
. По угловой скорости тангажа при ступенчатом за-
данном сигнале (рис. 6,
в
) алгоритм обеспечивает перерегулирование менее 1 %,
время
п.п
0, 59
t
=
с, по угловой скорости рысканья при заданном ступенчатом сиг-
нале (рис. 6,
д
,
е
) — перерегулирование менее 1 %, время
п.п
0, 6
t
=
с. Полученное
значение
п.п
t
соответствует требованиям, заложенным при выборе моделей желае-
мой динамики
( )
( )
( )
,
,
.
M р M р M р
γ
ϑ
ψ
Рис. 6.
Зависимости угловых скоростей крена (
а, б
), тангажа (
в, г
), рысканья (
д, е
) при
входном сигнале от времени при ступенчатом (
а, в, д
) и синусоидальном (
б, г, е
) воздей-
ствиях:
1
— L1 адаптивное управление;
2
— заданное управление;
3
— модельное управление
Наилучшим образом L1 адаптивный контур соответствует желаемой модели
для углов крена и тангажа, и чуть хуже для угла рысканья. Однако для всех угловых
скоростей не обеспечивается точное совпадение, так как входной фильтр
C
(
s
) для
каждого L1-контура ограничивает «стягивание» выходных сигналов контура и мо-
дели. На основе зависимостей можно сделать вывод, что L1-алгоритмы обеспечи-
вают компенсацию нелинейных динамических свойств рулевого привода и «стяги-
вание» выходного сигнала контура с желаемой моделью динамики.