














 6 / 16
6 / 16

Тан Синюань, В.П. Подчезерцев
20
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
где
А
— экваториальный момент инерции ротора;
x
и
y
—
углы отклонения
ротора относительно корпуса;
x
и
у
— угловые скорости корпуса гироскопа;
Н
— кинетический момент гироскопа;
1
у м
2
1
2
1
( )
1
T s
KW s K K K
T s
T s
— переда-
точная функция [6, 10] контура обратной связи (КОС) ДНГ (
K
θ
и
K
М
— крутизна
датчиков угла и момента,
K
у
— коэффициент усиления усилителя КОС);
М
х
и
М
у
— внешние возмущающие моменты.
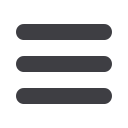
Структурная схема ДНГ в режиме ДУС, соответствующая этому уравнению,
показана на рис. 6.
Рис. 6.
Структурная схема ДНГ–ДУС
Рассмотрим методику испытаний на поворотном стенде применительно к
конкретной конструкции гироскопа типа ГВК-6 со следующими параметрами:
Н
= 200
10
–4
H
м
c,
А
= 5
10
–7
H
м, Ω = 1570 с
–1
— собственная скорость вра-
щения привода гироскопа,
K
θ
= 6 B/рад,
K
М
= 10 рад/(c
A). По результатам моде-
лирования уравнений движения гироскопа ГВК-6 в среде Simulink были полу-
чены следующие параметры обратной связи:
T
1
= 1,5
10
–4
c,
T
2
= 1
10
–3
c,
K
у
= 3 А/В. Результаты моделирования показаны на рис. 7 и 8. На рисунках обо-
значено:
t
1
— время захода поводка в паз,
t
2
— время достижения максимальной
допускаемой угловой скорости для гироскопа ГВК-6,
η
— географическая си-
стема координат (СК),
xyz
— СК, связанная с корпусом гироскопа.
Как показано на рис. 7, при развороте платформы в момент времени
t
2
угло-
вая скорость платформы превышает максимально допустимую угловую ско-
рость гироскопа ГВК-6. При этом датчик момента гироскопа не может обеспе-
чить достаточный управляющий момент, что вызывает отклонение ротора до
его предельного значения θ
max
= 0,5
о
. Ротор гироскопа касается ограничительно-
го упора, что приводит к потере его гироскопических свойств. Поэтому перед
поворотом платформы с гироскопом ГВК-6 вокруг ее горизонтальной оси необ-
ходимо отключить обратную связь и привод гироскопа. По окончании ее разво-
рота и арретирования в новом положении можно снова включить привод гиро-
скопа и контур его обратной связи. В то же время такое отключение при разво-
роте платформы вокруг оси
z
, совпадающей с вектором кинетического момента