














 2 / 16
2 / 16

Тан Синюань, В.П. Подчезерцев
16
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
Номенклатура стендов, выпускаемых во всем мире, огромна и цена вполне соот-
ветствует тем уникальным возможностям по ассортименту испытываемых при-
боров, сервису и точности задаваемых воздействий, которые они обеспечивают. В
то же время при известном ограничении типов испытываемых гироскопов и в
силу простоты требуемой от таких устройств кинематики движения очевидна
возможность создания дешевых и несложных в изготовлении, но точных меха-
низмов разворота испытательных стендов.
В настоящей работе предложено поворотно-арретирующее устройство,
обеспечивающее развороты платформы относительно географической системы
координат, двухосного прецизионного стенда с помощью механизма на базе
мальтийского креста, с функцией точного арретирования платформы стенда в
задаваемых положениях. Такой стенд обеспечивает возможность определения
масштабных коэффициентов и компонент погрешностей [5] ДНГ.
Конструкция механизма и принцип его работы.
Вид мальтийского пово-
ротно-арретирующего механизма, состоящего из мальтийского креста
1
, повод-
ка
4
и кулачка
3
с арретирующей поверхностью
S
2
, показан на рис. 1. Мальтий-
ский крест жестко соединен с платформой своей нижней частью (поверхность
Н
) и поворачивается вокруг оси
z
–
z
, а кулачок
3
с поводком
4
вращается вокруг
оси
z
1
–
z
1
двигателем с помощью редуктора.
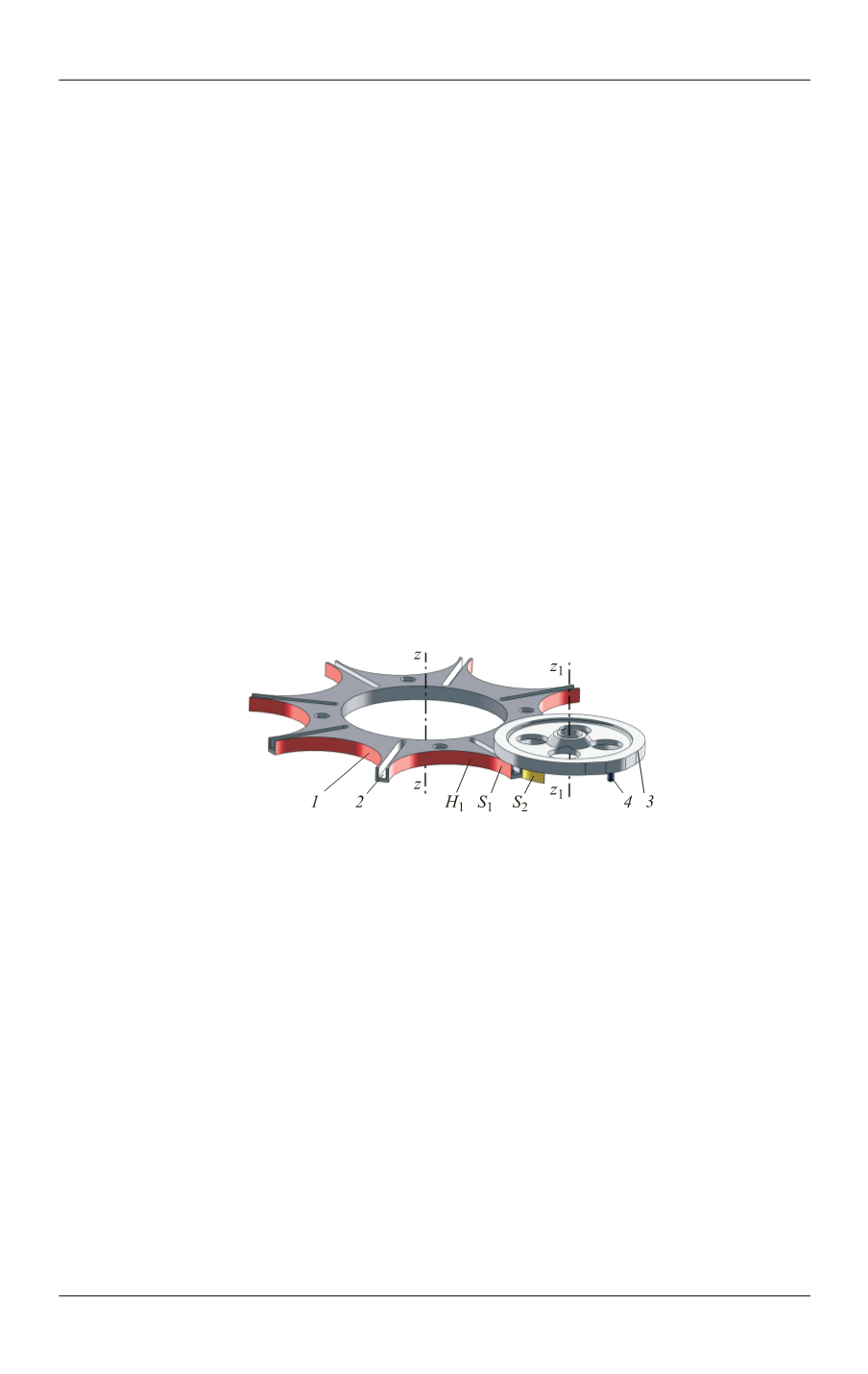
Рис. 1.
Механизм поворота и арретира испытательного стенда:
1
— мальтийский крест;
2
— направляющий паз;
3
— кулачок;
4
— поводок;
S
1
,
S
2
— контактирующие поверхности
арретирующего устройства
При движении поводка по направляющим пазам платформа, на которой
размещается калибруемый гироскоп, поворачивается и при непосредственном
контакте поверхностей
S
1
и
S
2
платформа жестко арретируется в заданном по-
ложении. В рассматриваемой конструкции мальтийского механизма число по-
верхностей
S
1
соответствует числу фиксированных положений.
На рис. 2 показана кинематическая схема движения поворотно-аррети-
рующего устройства при повороте поводка на 360
о
. В исходном положении (
a
)
(
= 0,
= 0) крест благодаря непосредственному контакту арретирующих по-
верхностей мальтийского креста
S
1
и арретира
S
2
находится в заарретированном
положении. Для поворота платформы включается вращение кулачка
3
с повод-
ком
4
. В процессе поворота поводка из начального положения до захода в