














 3 / 16
3 / 16

Специализированное устройство контрольно-измерительного стенда для аттестации…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
17
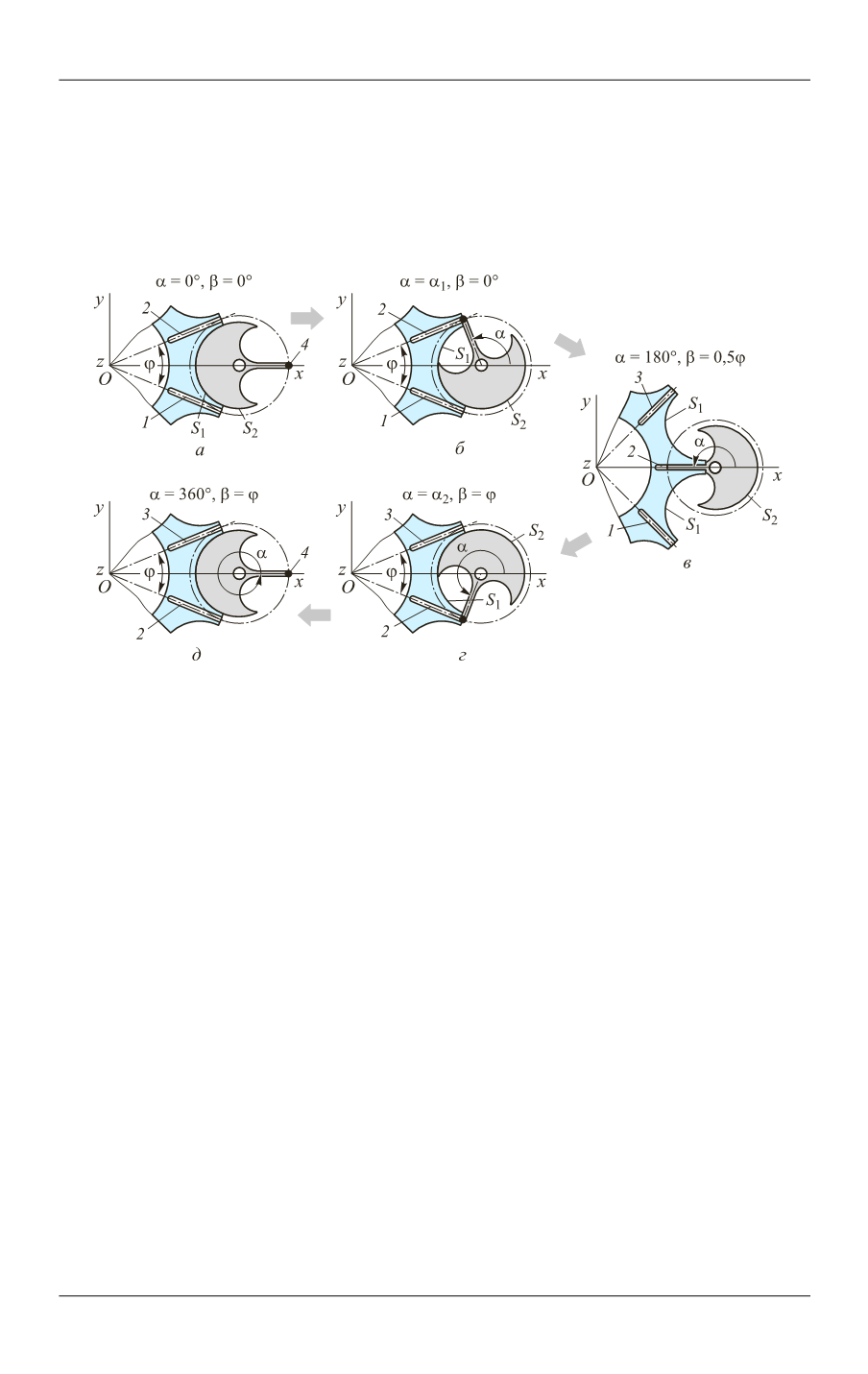
направляющий паз
2
(0 <
<
1
,
= 0) платформа продолжает находиться в за-
арретированном положении (
б
). Далее при движении поводка по направляю-
щему пазу (
1
<
<
2
) крест с платформой поворачивается на угол
= φ и после
выхода поводка из паза (
>
2
) мальтийский крест вновь арретируется поверх-
ностями
S
1
и
S
2
, но уже в новом положении (
д
), где
= φ.
Рис. 2.
Кинематическая схема движения поворотно-арретирующего устройства (
а
–
д
):
— угол поворота поводка от исходного положения;
1
= 90
ο
+ 0,5φ,
2
= 360
ο
–
1
— углы
поворота поводка при заходе и выходе из паза мальтийского креста; β — угол поворота креста
(платформы) вокруг оси
z
;
— угол между двумя пазами, определяемый числом положений
платформы
z
= 8,
= 360
о
/
z
Определение необходимых условий поворота и арретирования платфор-
мы.
Следует отметить, что при заходе поводка в направляющий паз мальтий-
ский крест должен одновременно разарретироваться для обеспечения возмож-
ности его разворота. Это достигается прекращением контакта между поверхно-
стями
S
1
и
S
2
, после чего крест может поворачиваться в следующее положение.
После выхода поводка из направляющего паза крест прекращает поворачивать-
ся и одновременно арретируется в новом положении благодаря контакту по-
верхностей
S
′
1
и
S
2
. В момент захода и выхода поводка
4
из паза
2
поверхности
контакта
S
1
и
S
′
1
мальтийского креста должны касаться в точках
С
,
D
или
B
,
E
,
показанных на рис. 3, и находиться в состоянии контакта на межосевой линии
ОО
1
для исключения заклинивания механизма, что соответствует выполнению
условия φ + ϑ = 180
о
.
При этом в процессе калибровки будет обеспечиваться жесткая и надеж-
ная фиксация и плавность процессов разарретирования и арретирования плат-
формы.