














 9 / 16
9 / 16

Специализированное устройство контрольно-измерительного стенда для аттестации…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
23
гироскопических чувствительных элементов. Чтобы предотвратить возникновение
зазора, вызванного технологическими или температурными факторами, и обеспе-
чить точную фиксацию платформы должен быть предусмотрен предварительный
натяг. Возникающие при этом контактную силу и момент трения
т
M
между этими
поверхностями необходимо оценить для выбора привода стенда.
Момент трения
т
,
M
вызываемый давлением
р
в зоне контакта, определя-
ется следующим выражением:
т
,
S
M R pds
(4)
где μ = 0,09 — коэффициент трения стали по стали;
R —
радиус контактирую-
щих поверхностей;
р
— контактное давление;
s
— площадь контактирующих
поверхностей.
Расчет результирующего контактного давления необходимо проводить с уче-
том жесткости
k
шарикоподшипника, на котором установлен мальтийский крест
(рис. 10). Проведенный расчет контактных напряжений
p
(см. рис. 10,
б
)
в среде SolidWorksSimulation с учетом шарикоподшипника типа 1000816, имеюще-
го радиальную жесткость
k
= 60 Н/мкм, позволил определить суммарную внеш-
нюю силу
F
, действующую на кулачек (см. рис. 10,
а
):
cos
.
S
F p
ds
(5)
Интегрируя контактное давление, в соответствии с выражением (5) получа-
ем
F
= 230 Н между контактирующими поверхностями при смещении, равном
5 мкм и обусловленном технологической неточностью изготовления. В соответ-
ствии с выражением (4) момент трения
т
M
= 0,7 Н
м. Если учесть номиналь-
ный вращающий момент двигателя ДПР-42-Н1-03 совместно с редуктором,
равный
н
M
= 1,26 Н
м [8], то коэффициент запаса по моменту, развиваемому
двигателем, определяется выражением
н
т
1, 8.
MK
M
Полученный коэффициент запаса
K
является недостаточным для устрой-
ства, предназначенного для работы в режиме непрерывного технологического
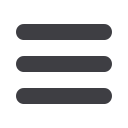
Рис. 9.
Кинематическая связь неточности выставки платформы c зазором между
арретируемыми поверхностями