














 4 / 16
4 / 16

Тан Синюань, В.П. Подчезерцев
18
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 6
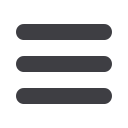
Рис. 3.
Иллюстрация моментов касания поверхностей
S
1
и
S
2
,
S
′
1
и
S
2
в точках
C
,
D
и
B
,
E
при заходе (
а
) и выходе (
б
) поводка
4
в паз и из паза
2
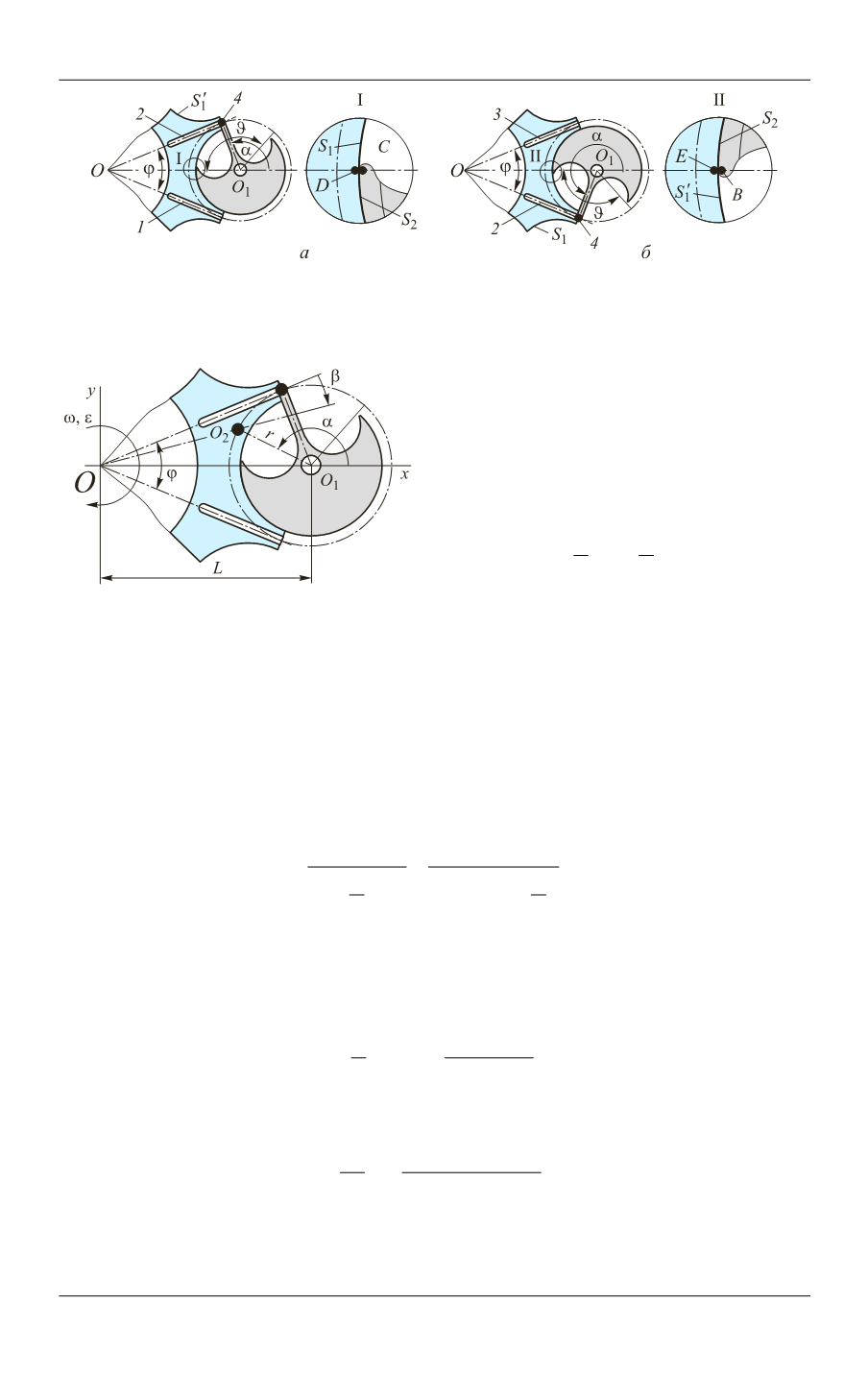
Кинематические характеристики
поворотно-арретирующего механизма.
Рассмотрим кинематику движения меха-
низма поворота, приведенного на рис. 4,
в соответствии с которым соотношение
между
r
и
L
имеет следующий вид:
sin .
2
r
L
(1)
При повороте поводка из исходно-
го положения до захода поводка в
направляющий паз
= 0,
= 0,
= 0. В
процессе дальнейшего движения повод-
ка по направляющим пазам (
1
<
<
2
)
крест поворачивается со скоростью
≠ 0 и ускорением
≠ 0. В соответствии с
формулой синусов для рассматриваемого треугольника
ОО
1
О
2
соотношение
между углами поворота мальтийского креста
и поводка
имеет вид
,
sin
sin
2
2
r
L
где
,
— угловая скорость поводка, определяемая скоростью вращения двига-
теля (через редуктор),
t
( 22
о
/с).
Откуда с учетом соотношения (1) получим
sin
arctg
2
1 cos
.
Дифференцируя это уравнение по времени, получаем
2
cos
.
1 2 cos
d
dt
После выхода поводка из направляющих пазов мальтийский крест (плат-
форма) арретируется в новом положении при этом
= 45
о
,
= 0,
= 0.
Рис. 4.
Кинематика движения
мальтийского механизма:
r —
радиус поводка;
L
— межосевое расстоя-
ние;
и
— угловые скорость и ускорение
платформы