














 3 / 18
3 / 18

26
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. «Приборостроение». 2016. № 3
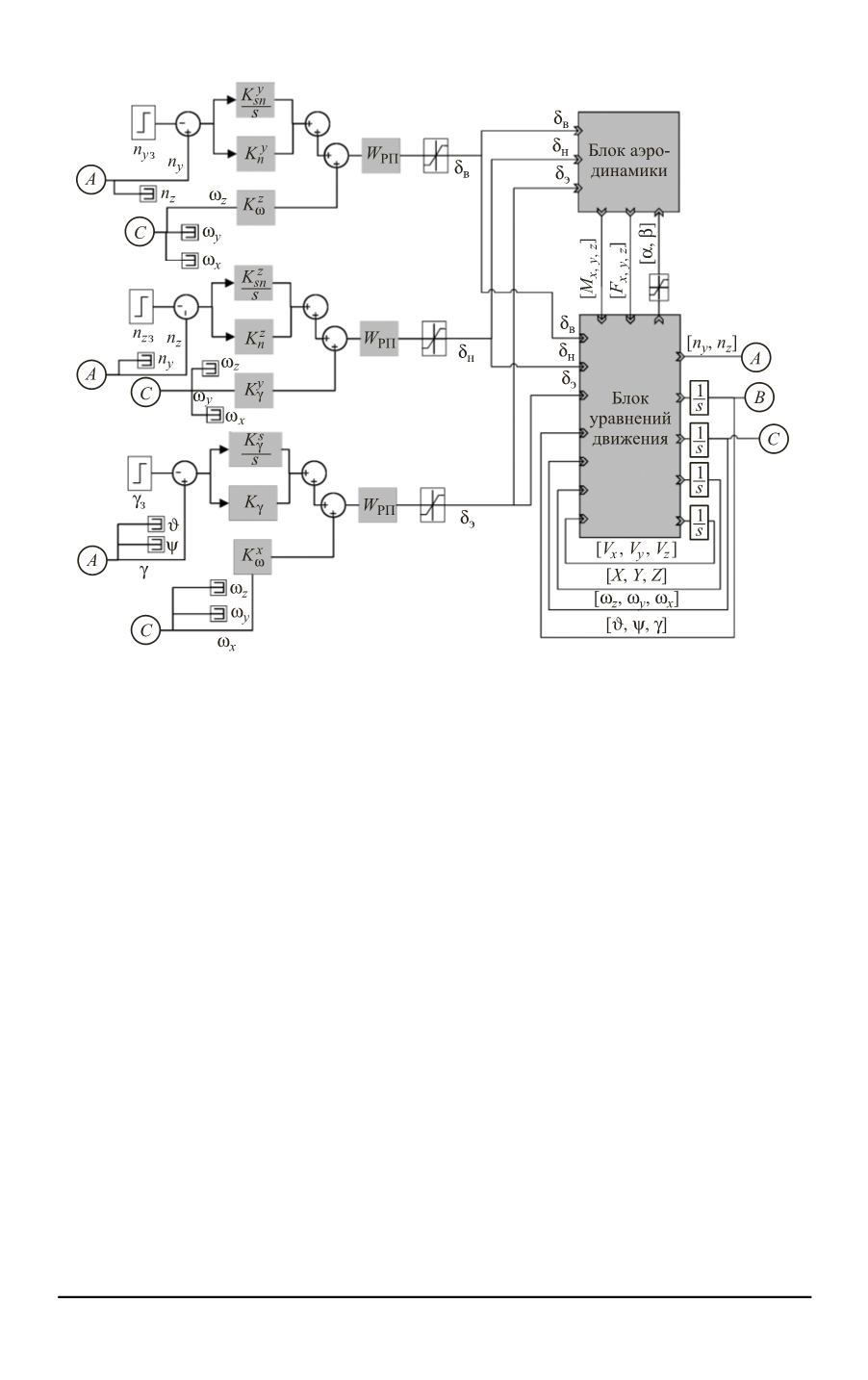
Рис. 1.
Структурная схема ССт БЛА:
РП
W
— передаточная функция рулевого привода (РП);
в н э
, ,
— углы отклонения
рулей высоты, рулей направления и элеронов;
т
[ , , ]
x y z
V V V
V
— вектор скорости в
связанной системе координат;
т
[ , ]
y z
n n
n
— вектор перегрузок в продольном и
боковом каналах БЛА;
т
[ ,
,
]
x y z
ω
— вектор угловых скоростей БЛА;
, ,
— углы тангажа, рыскания, крена;
з
з з
,
,
y z
n n
— заданные значения пере-
грузок и угла крена
Сигналами управления для продольного и бокового каналов явля-
ются перегрузка продольного и бокового каналов соответственно.
Сигнал управления для канала крена
—
угол крена.
В каждом канале ССт замыкается двумя обратными связями. Про-
дольный и боковой каналы замыкаются по перегрузке и угловой ско-
рости, канал крена
—
по углу крена и угловой скорости. Между кана-
лами действуют перекрестные связи, формируемые блоком уравнений
движения.
Каналы стабилизации формируют сигналы на отклонение рулей.
Выходными сигналами рулевых приводов являются отклонение руля
высоты, руля направления и элеронов. Сигналы отклонения рулей
необходимы для расчета аэродинамики летательного аппарата.