














 17 / 21
17 / 21

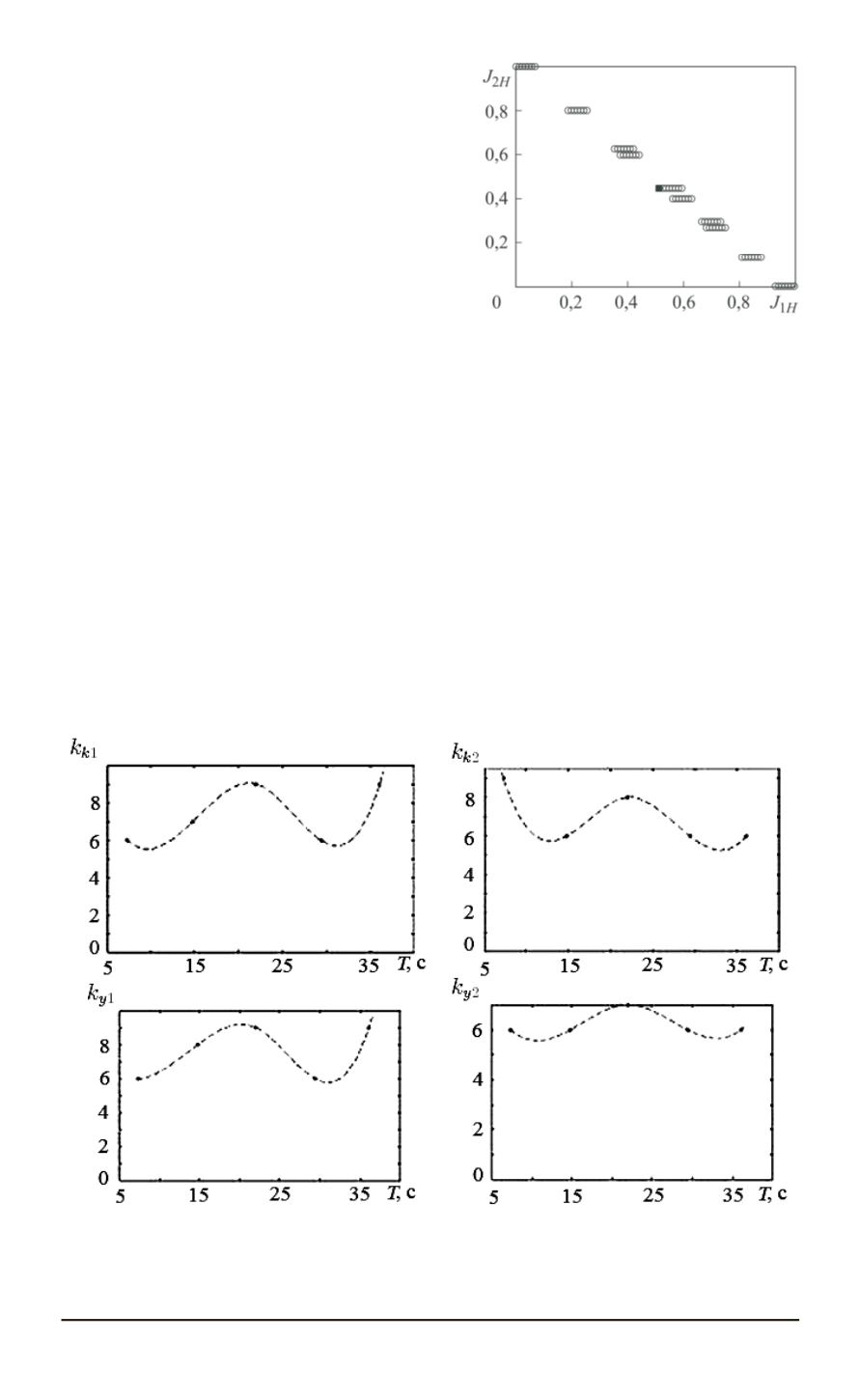
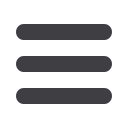
Рис. 9. Область показателей двух-
канальной системы наведения с
учетом оптимальных параметров
системы стабилизации
сбалансирована по наведению и ее па-
раметры выбираются из уже получен-
ных в результате оптимизации систе-
мы стабилизации (рис. 9, 10). На осно-
вании полученных данных переходим
к исследованию иерархической систе-
мы “наведение–стабилизация” на со-
ответствующих интервалах времени.
В качестве примера рассмотрим
результаты параметрической оптими-
зации на уровне наведения для одно-
го из интервалов времени на опорной
траектории. Параметры системы ста-
билизации на этом интервале времени
и при соответствующих перегрузках на опорной траектории примем
равными:
[
k
ДЛУ1
, k
ДГ1
, k
ДЛУ2
, k
ДГ2
, k
СГ3
, k
ДГ3
]
T
= [0
,
85
,
5
,
33
,
1
,
17
,
9
,
1
,
6
,
14
,
7]
T
.
Варьируя параметры в каналах системы наведения, решаем си-
стему дифференциальных уравнений, описывающих двухуровневую
иерархическую систему перекрестными связями, с учетом принятых
управлений на уровнях иерархии в соответствии с обобщением зада-
чи получения оптимального решения для сети значений параметров на
Рис. 10. Оптимальные значения параметров уровня наведения в зависимости
от моментов времени
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 4 29